
SIEMIENS 1FK6 series three-phase servo motor
SIEMIENS 1FK6 series three-phase servo motor
Core positioning and basic information
Safety Regulations: Core Risks and Protection Requirements
Safe operation is the primary focus emphasized in the document, and multiple types of risks and mandatory protective measures have been identified based on the characteristics of the motor
(1) Electrical safety risks
Voltage hazard: When the motor rotor rotates, the terminal voltage can reach up to 300V, and direct contact can cause electric shock accidents.
Operating standards:
All electrical operations must be carried out after the motor has completely stopped, and only certified electricians are allowed to operate;
Strictly follow the EN 50110-1 (DIN VDE 0105-100) standard, and before operation, follow the five step process of "power-off - isolation - electrical testing - grounding short circuit - shielding adjacent live parts";
Unauthorized modification of electrical circuits or shielding layers is prohibited to avoid short circuits or electromagnetic interference.
(2) Permanent magnet safety risks
Magnetic field hazard: The motor rotor is equipped with high magnetic flux density permanent magnets, which have strong attraction to ferromagnetic objects and can interfere with pacemakers and damage electronic data carriers (such as hard drives, USB drives, magnetic cards).
Protective measures:
It is explicitly prohibited for users of pacemakers to enter the motor disassembly area, and conspicuous signs must be posted on site;
Electronic data carriers should be kept away from the motor (especially the disassembled rotor), with a minimum safe distance of no less than 1m;
During transportation or storage, avoid close contact between the motor and ferromagnetic objects such as iron tools and steel to prevent component damage caused by adsorption and collision.
(3) Thermal safety risk
High temperature hazards: The surface temperature of the motor during operation can reach up to 140 ℃. Direct contact can cause burns, and high temperatures may damage adjacent temperature sensitive components such as wires and electronic components.
Protection requirements:
Do not touch the high-temperature surface of the motor, and install anti touch and anti protective covers if necessary;
Temperature sensitive components should be kept away from the surface of the motor to avoid direct contact;
Ensure the effective operation of the motor temperature control device to prevent damage to windings and bearings due to overheating, or demagnetization of permanent magnets.
(4) Environmental and installation safety restrictions
Prohibit the use of motors in explosion-proof areas (unless specially certified by Siemens);
During the installation, transportation, and maintenance of the motor, it is necessary to avoid severe impacts to prevent permanent magnet displacement or winding damage;
The maximum weight of the motor is 50kg, and lifting devices that comply with Appendix I of the 98/37/EEC Machinery Directive (such as lifting rings and slings) must be used for handling. It is prohibited for a single person to handle in violation of regulations.
Product Core Information: Attributes, Applications, and Delivery
(1) Core attributes of the product
The 1FK6 series motor is a permanent magnet excitation three-phase synchronous servo motor, with a core design adapted to the "sine current principle motor control pulse inverter". Precise control of speed and torque needs to be achieved through a frequency converter, and direct connection to the three-phase power grid is prohibited (otherwise it will cause winding burnout and permanent magnet demagnetization). The motor adopts self cooling method, compact structure, suitable for high-precision driving and positioning scenarios, and has the characteristics of low noise, long life, and high protection level (IP64).
(2) Typical application scenarios
Mainly used for equipment with strict requirements for driving accuracy and response speed, including:
Machine tools (cutting, machining centers);
Automated production equipment;
Industrial robot;
Material handling devices (such as conveyors, robotic arms).
(3) Delivery scope and acceptance requirements
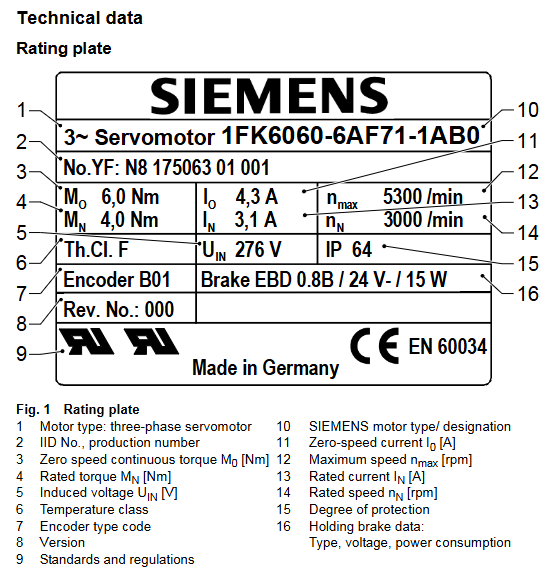
Delivery list: motor body (including integrated encoder, optional brake), separate product nameplate (to be attached near the equipment for reference), multilingual manual;
Acceptance criteria:
After receiving the goods, it is necessary to immediately verify the waybill with the physical object to confirm that there are no missing parts or transportation damage;
If any transportation damage is found, it is necessary to immediately claim compensation from the carrier; If there are component defects or incomplete deliveries, it is necessary to promptly contact the responsible representative of Siemens;
The instruction manual should be properly stored in an easily accessible location near the equipment for easy operation and maintenance reference.
Key technical parameters: performance and adaptation indicators
(1) Infrastructure and protection parameters
Parameter category specific indicator standard basis
Installation form standard IM B5, optional IM V1, IM V3 EN 60034-7
Protection level IP64 (dustproof, splash proof), optional IP65 (enhanced dustproof and waterproof), drive end flange can be upgraded to IP67 EN 60034-5
Cooling method: self cooling (no additional cooling device required) EN 60034-6
Design standard for shaft end: keyway free cylindrical shaft (tolerance k6); Optional: with keyway+key (tolerance k6, half key balance) DIN 748-3, IEC 60072-1
(2) Electrical and Performance Parameters
Parameter category specific indicator standard basis
Insulation class F (maximum allowable operating temperature 155 ℃) EN 60034-1
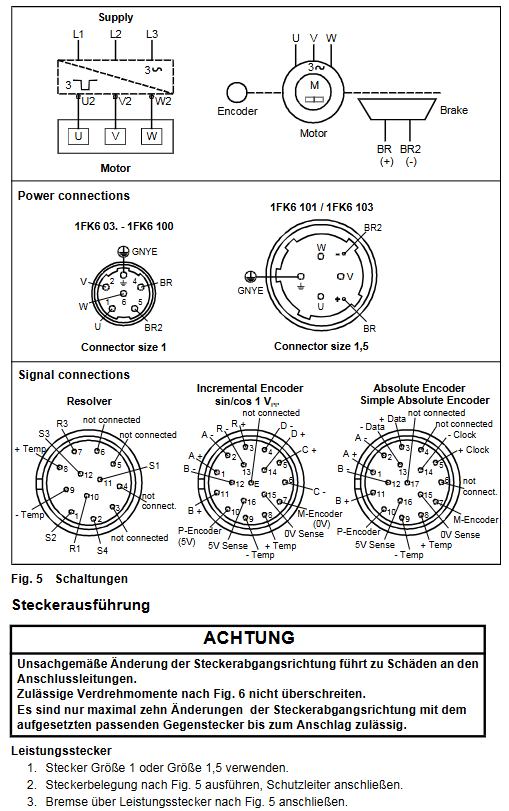
Braking parameters: normally closed holding brake (optional), power supply voltage 24V DC ± 10%, power 15W DIN VDE 0580
Speed range: Rated speed (nN) ≤ 3000rpm, maximum speed (nmax) ≤ 5300rpm, as indicated on the product nameplate
Torque parameters: Zero speed continuous torque (M0) up to 6.0Nm, rated torque (MN) up to 4.0Nm, as indicated on the product nameplate
Current parameters: Rated current (IN) up to 4.3A, zero speed current (I0) up to 3.1A, as indicated on the product nameplate
Noise level 1FK6 03./04.: ≈ 55dB (A); 1FK6 06.:≈65dB (A); 1FK6 08./10.: ≈ 70dB (A) (below 3000rpm) EN 60034-9
(3) Environmental and lifespan parameters
Parameter category specific indicator standard basis
Environmental temperature operation: -15 ℃~+40 ℃; Exceeding the range requires derating (power factor 0.92 at 50 ℃, power factor 0.82 at 60 ℃) EN 60034-1
Altitude adaptation ≤ 1000m (standard); 2000m power factor 0.942500m power factor 0.9 EN 60034-1
Bearing lifespan Rolling bearings (lifetime lubrication), reference lifespan 20000h Siemens design specifications
Radial shaft seal lifespan of approximately 5000 hours under oil lubrication conditions according to Siemens design specifications
Vibration tolerance vibration acceleration ≤ 5g, vibration level N EN 60034-14
(4) Optional configuration parameters
Encoder system: incremental encoder (sin/cos 1VPP), absolute encoder (EnDat protocol), simple absolute encoder, rotary transformer;
Additional components: planetary gearbox, normally closed holding brake;
Protection upgrade: IP65 protection level, IP67 protection for drive end flange.
Installation and Connection: Specifications and Key Requirements
(1) Transportation and Storage Standards
Transportation requirements:
Use appropriate lifting devices (such as slings and rings) to avoid tying the motor shaft or flange directly with ropes and prevent damage to components;
During transportation, it is necessary to fix it firmly, avoid severe bumps or impacts, and prevent the permanent magnet from shifting;
Comply with local transportation regulations, clarify that the motor is a "strong magnet containing equipment", and avoid magnetic interference issues during air transportation.
Storage conditions:
The storage environment needs to be dry, low dust, and low vibration (effective vibration speed)v eff<0.2mm/s);Avoid direct sunlight or high temperature and humidity environments to prevent the winding from getting damp or the performance of the permanent magnet from deteriorating;
Before storage, remove the rust inhibitor at the shaft end (using commercial solvents) to avoid affecting subsequent installation.
(2) Mechanical installation requirements
Installation gap: At least three sides of the motor need to reserve a 100mm heat dissipation gap to ensure self cooling effect;
Fixed specifications:
Use hexagon socket head screws with a strength grade of ≥ 8.8 to fix the flange, and tighten them evenly (to avoid flange deformation);
The screw torque must meet the equipment requirements, and excessive tightening is prohibited to cause thread damage;
Load limit:
Motors with integrated brakes are prohibited from bearing axial forces, and radial forces must strictly follow the requirements of the project planning guidelines;
When installing vertically (with the shaft end facing upwards), protective measures should be taken to prevent liquid from seeping into the upper bearing;
Balance requirements:
Motors with keyways are already balanced with half keys when they leave the factory. After installing output components such as couplings and gears, they need to be rebalanced according to ISO 1940 standards;
Do not strike the motor shaft or bearings. Special tools (such as a puller) should be used to install/remove the output components. If necessary, the output components can be heated (to avoid high temperature conduction to the inside of the motor).
(3) Electrical Connection Specification
Cable selection:
Pre assembled shielded cables recommended by Siemens must be used (not within the scope of delivery), and power cables and signal cables must be laid separately to avoid electromagnetic interference;
The cable should be compatible with the rated voltage and current of the motor, and have sufficient mechanical strength to avoid pulling and damaging it;
Plug connection:
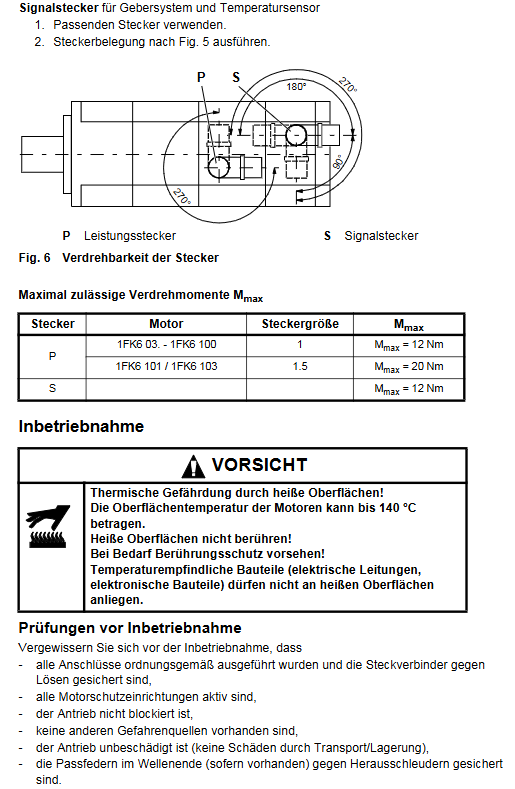
The plug types are divided into power plug (P) and signal plug (S), and the wiring must strictly follow the drawing (Fig.5), and misconnection is prohibited;
The plug torque must comply with the specifications (power plug: 12Nm/20Nm, signal plug: 12Nm), and excessive twisting is prohibited;
The direction of the plug can be adjusted up to 10 times (when equipped with a matching socket) to avoid cable fatigue damage;
The inside of the plug should be clean and free of residue and moisture, and the sealing surface should be intact to ensure an IP64 protection level;
Grounding and shielding:
The protective conductor (PE) must be reliably grounded, and the grounding resistance must comply with local electrical regulations;
The cable shielding layer needs to be grounded at both ends to reduce high-frequency harmonic radiation and avoid electromagnetic interference (EMC);
Special requirements:
The encoder and temperature sensor are electrostatic sensitive components, and touching their connection terminals with hands or tools with static electricity is prohibited;
The temperature sensor can only cope with conventional overheating scenarios, and an additional thermal overload relay needs to be configured when the motor is stationary and overloaded.
Start up, operation and maintenance, and troubleshooting
(1) Pre startup inspection
Electrical connection inspection: Confirm that all plugs are securely fastened, the wiring is correct, and there are no loose or short circuit hazards;
Mechanical state inspection: manually rotate the motor output component to confirm that there is no jamming or friction noise, and that the keyway (if any) is fixed;
Protection device inspection: Motor overload protection, temperature protection and other devices have been activated and function normally;
Environmental condition inspection: The installation environment temperature and altitude meet the requirements, and the heat dissipation gap is sufficient;
Auxiliary equipment inspection: The supporting equipment such as frequency converter and encoder have been debugged and the parameters are adapted to the characteristics of the motor.
(2) Start the process
Brake test (with brake motor): Apply 24V DC ± 10% voltage to brake pins BR and BR2 to confirm that the rotor can rotate freely without friction noise;
Inverter startup: Start the system according to the instructions of the inverter (such as SIMODRIVE, MASTERDRIVES MC), and the initial speed should be lower than the rated speed;
Operation monitoring: Observe the operation status of the motor, confirm that the speed and torque meet the requirements, and there is no abnormal vibration, noise, or overheating;
Positioning test (positioning scenario): Verify that the encoder signal is normal and the motor positioning accuracy meets the standard;
Emergency stop test: Trigger the emergency stop button, confirm that the brake and frequency converter are linked normally, and the motor can quickly stop.
(3) Daily maintenance and cycle requirements
Cleaning and maintenance: Regularly clean the dust and oil stains on the surface of the motor to ensure effective heat dissipation. Power off during cleaning to prevent water or cleaning agents from seeping into the interior of the motor;
Status check:
Regularly inspect cables and plugs for damage, aging, and loose fasteners;
Monitor the operating temperature, vibration, and noise of the motor, and promptly shut down for troubleshooting if any abnormalities are found;
Periodic maintenance reference:
Bearing: The reference life is 20000 hours. If there is abnormal noise or increased vibration during operation, it should be replaced in a timely manner;
Radial shaft seal (oil lubrication): with a reference life of 5000 hours, regularly check for leaks and replace if necessary;
Special maintenance: After disassembling the motor, the encoder system must be recalibrated, otherwise it will affect the positioning accuracy.
(4) Common faults and solutions
Core causes of fault phenomena and solutions
Irregular motor operation: 1. Insufficient shielding of motor/encoder cables, electromagnetic interference; 2. The gain of the frequency converter controller is too high. 1. Check if the grounding of the cable shielding layer is reliable; 2. Reduce the controller gain according to the frequency converter manual
Severe motor vibration: 1. Coupling/load imbalance; 2. Poor alignment of the drive chain; 3. Loose fixing screws. 1. Rebalance the load and coupling components; 2. Calibrate the coaxiality of the drive chain; 3. Check and tighten all fasteners
Abnormal operating noise (abnormal noise): 1. Foreign objects enter the interior of the motor; 2. Bearing wear or damage; 3. Permanent magnet displacement: 1. Stop the machine for inspection and remove foreign objects; 2. Replace the bearings; 3. Contact Siemens for professional maintenance
Motor overheating (surface temperature>140 ℃) 1. Load exceeding rated torque; 2. Insufficient heat dissipation gap or surface dust; 3. Temperature sensor malfunction: 1. Reduce the load to the rated range; 2. Clean the surface dust and increase the heat dissipation gap; 3. Repair or replace the temperature sensor
Encoder signal abnormality: 1. Encoder wiring error; 2. The encoder is subject to electromagnetic interference; 3. The encoder is damaged. 1. Check the wiring diagram and rewire it; 2. Strengthen cable shielding and grounding; 3. Replace the encoder and calibrate it
(5) Equipment Disposal Standards
When the motor is scrapped, it should be classified and recycled according to national/local regulations, or returned to Siemens for disposal. It is prohibited to dispose of it at will;
Encoders, brakes, and other electronic components need to be disposed of separately as electronic waste to avoid environmental pollution;
Before disposal, it is necessary to remove the permanent magnets inside the motor (operated by professionals) to prevent strong magnetic fields from causing harm to disposal personnel or equipment.
- OMRON
- ABB
- General Electric
- EMERSON
- Honeywell
- HIMA
- ALSTOM
- Rolls-Royce
- MOTOROLA
- Rockwell
- Siemens
- Woodward
- YOKOGAWA
- FOXBORO
- KOLLMORGEN
- MOOG
- KB
- YAMAHA
- BENDER
- TEKTRONIX
- Westinghouse
- AMAT
- AB
- XYCOM
- Yaskawa
- B&R
- Schneider
- KONGSBERG
- NI
- WATLOW
- ProSoft
- SEW
- ADVANCED
- Reliance
- TRICONEX
- METSO
- MAN
- Advantest
- STUDER
- DANAHER MOTION
- Bently
- Galil
- EATON
- MOLEX
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- Beijer
- Moxa
- Rexroth
- Johnson
- WAGO
- TOSHIBA
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- Application field
- XP POWER
- CTI
- TRICON
- STOBER
- Thinklogical
- Horner Automation
- Meggitt
- Fanuc
- Baldor
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- Iba
- Beckhoff
- ADLINK
-
 Rolls Royce H1111.0204 Ship Main Controller
Rolls Royce H1111.0204 Ship Main Controller -
 Basler Electric BE3-32-3AC Reverse Power Relay 9 1376 00 105
Basler Electric BE3-32-3AC Reverse Power Relay 9 1376 00 105 -
 Basler Electric BE3-25-1A1N4 Synch Check Relay 9319100100
Basler Electric BE3-25-1A1N4 Synch Check Relay 9319100100 -
 Basler Electric SR4A-2B15B3A Static Voltage Regulator
Basler Electric SR4A-2B15B3A Static Voltage Regulator -
 Basler Electric SR4A-2B15B3E Static Voltage Regulator
Basler Electric SR4A-2B15B3E Static Voltage Regulator -
 Basler Electric 9170818100 Solid State Protective Relay
Basler Electric 9170818100 Solid State Protective Relay -
 Basler Electric AEC63-7 Analog Excitation Controller
Basler Electric AEC63-7 Analog Excitation Controller -
 Basler Electric 17483 Auxiliary Module
Basler Electric 17483 Auxiliary Module -
 Basler Electric BE1-59 Over Voltage Relay
Basler Electric BE1-59 Over Voltage Relay -
 Basler Electric 21600-101 Control Module
Basler Electric 21600-101 Control Module -
 Basler Electric KR2F Generator Voltage Regulator 9056600100
Basler Electric KR2F Generator Voltage Regulator 9056600100 -
 Basler BE1-CDS Current Differential System
Basler BE1-CDS Current Differential System -
 Basler Electric CBS 212 Current Boost System 9 2650 00 100
Basler Electric CBS 212 Current Boost System 9 2650 00 100 -
 Basler Electric IFM-150 Firing Circuit Chassis
Basler Electric IFM-150 Firing Circuit Chassis -
 Basler Electric BE1-60 Voltage Balance Relay C1F A1P D0C3F
Basler Electric BE1-60 Voltage Balance Relay C1F A1P D0C3F -
 Basler Electric BE1-32R Power Relay A2E D1R A0N0F
Basler Electric BE1-32R Power Relay A2E D1R A0N0F -
Basler Electric BE1-32R Power Relay A2E D1R A0N0F
-
 Basler Electric 8650C80G01 Isolation Transducer PCB Board
Basler Electric 8650C80G01 Isolation Transducer PCB Board -
 ETEL EA-P2M-300-4/7.5A-0100-01 AccurET Modular 300 Servo Drive
ETEL EA-P2M-300-4/7.5A-0100-01 AccurET Modular 300 Servo Drive -
 Basler Electric 87T Transformer Differential Relay
Basler Electric 87T Transformer Differential Relay -
 Basler Electric BE-6868 Power Transformer 5950007559202
Basler Electric BE-6868 Power Transformer 5950007559202 -
 Basler Electric PRS250 Veri-Sync Relay 9088800102
Basler Electric PRS250 Veri-Sync Relay 9088800102 -
 Basler Electric SCP-250-G-60 VAR Power Factor Controller
Basler Electric SCP-250-G-60 VAR Power Factor Controller -
 Basler DECS-150 AVR 1NS2V1N1S Voltage Regulator
Basler DECS-150 AVR 1NS2V1N1S Voltage Regulator -
 Basler UFOV 260A Under Frequency Overvoltage Module
Basler UFOV 260A Under Frequency Overvoltage Module -
 Basler MOC2 199 Motor Operated Control – Overview and Setup
Basler MOC2 199 Motor Operated Control – Overview and Setup -
 Basler BE3-49R-5K5A1 Temperature Relay – Complete Guide
Basler BE3-49R-5K5A1 Temperature Relay – Complete Guide -
Basler BE 20035 001 Transformer – Technical Data and Installation
-
 Basler BE 02727 001 Transformer – Specifications and Usage
Basler BE 02727 001 Transformer – Specifications and Usage -
 Basler BE127 Under Voltage Relay – Features and Application Guide
Basler BE127 Under Voltage Relay – Features and Application Guide -
Basler CBS377 Current Boost System – Complete Technical Guide
-
 Basler BE1-87G P/N 9170818100 Differential Relay – In-Depth Specs
Basler BE1-87G P/N 9170818100 Differential Relay – In-Depth Specs -
Basler BE1-87G Generator Differential Relay – Technical Overview
-
Basler Electric SR4A2B16 SVR Static Voltage Regulator – Complete Guide
-
 Basler Electric 9261500101 Power Supply Module
Basler Electric 9261500101 Power Supply Module -
 Basler Electric AEM-2020 Analog Expansion Module
Basler Electric AEM-2020 Analog Expansion Module -
Basler Electric DGC-2020 Digital Genset Controller 51BRBNEAH001
-
Basler Electric BE1-59N Ground Fault Overvoltage Relay
-
 Basler Electric BE1-59N-A5E-E1L-N0S1F Neutral Overvoltage Relay
Basler Electric BE1-59N-A5E-E1L-N0S1F Neutral Overvoltage Relay -
Basler Electric MOC2499 Motor Operator Control Potentiometer 9072300430
-
 Basler Electric BE1-50/51M Overcurrent Relay
Basler Electric BE1-50/51M Overcurrent Relay -
 Basler Electric 9148100106 MOC3502 Solid State Relay 250VDC 0.25A
Basler Electric 9148100106 MOC3502 Solid State Relay 250VDC 0.25A -
 Basler Electric CBS 212 Current Boost System 9265000100
Basler Electric CBS 212 Current Boost System 9265000100 -
 Basler Electric 10493002 Control Module
Basler Electric 10493002 Control Module -
Basler BE1-32R D3E E1R A0N1F Power Relay
-
 Basler SR8A2B15B3A Static Voltage Regulator
Basler SR8A2B15B3A Static Voltage Regulator -
 Basler IFM-105 Firing Circuit Chassis 9324100105
Basler IFM-105 Firing Circuit Chassis 9324100105 -
Basler SR4A2B05B3A Static Voltage Regulator
-
 Basler BE151G1EB6PB0N0F Protective Relay
Basler BE151G1EB6PB0N0F Protective Relay -
Basler BE1-59 Electric Over Voltage Relay
-
 Basler 277 Static Programmable Powerline Carrier Channel
Basler 277 Static Programmable Powerline Carrier Channel -
 Basler BE1-32R D1E A1P A0N1F Power Relay
Basler BE1-32R D1E A1P A0N1F Power Relay -
Basler SR4A1B07B3A Static Voltage Regulator
-
 Basler Electric BE1-700 Digital Protective Relay
Basler Electric BE1-700 Digital Protective Relay -
Basler Electric SR8A-2B01B3A Static Voltage Regulator
-
 Basler Electric SR4A-2B01B3E Static Voltage Regulator
Basler Electric SR4A-2B01B3E Static Voltage Regulator -
 Basler Electric 9017709102 PC Board
Basler Electric 9017709102 PC Board -
Basler Electric SR4A-2B01B3A Static Voltage Regulator
-
 Basler Electric PRS-250 Veri-Sync Relay
Basler Electric PRS-250 Veri-Sync Relay -
 Basler Electric 9066800102 Excitation Support System
Basler Electric 9066800102 Excitation Support System -
Basler Electric BE1-87G Generator Differential Relay 9 1708 18 100
-
 Basler Electric 36T865-2 BE03752001 Power Supply
Basler Electric 36T865-2 BE03752001 Power Supply -
 Basler Electric M-300 149D940G02 Power Supply
Basler Electric M-300 149D940G02 Power Supply -
 Basler Electric ACA2040-25GM 4Mp 25Fps Area Scan Camera
Basler Electric ACA2040-25GM 4Mp 25Fps Area Scan Camera -
 Basler BE1-87G-S1A-A1C-A0N0 Differential Relay
Basler BE1-87G-S1A-A1C-A0N0 Differential Relay -
Basler SR8A-2B06B3E Static Regulator SR8A2B06B3E
-
 Basler SCP-210 Frequency Controller 9095400100
Basler SCP-210 Frequency Controller 9095400100 -
 Basler BE1-59-A3E-A1J-N1N3F Overvoltage Relay BE159A3EA1JN1N3F
Basler BE1-59-A3E-A1J-N1N3F Overvoltage Relay BE159A3EA1JN1N3F -
Basler 9 2011 11 100 Bracket Mounted Terminal Unit
-
Basler 9 1606 00 101 Voltage Regulator
-
 Basler CBS-377 Current Boost System 9109600102
Basler CBS-377 Current Boost System 9109600102 -
 Basler 8650C72 Exciter Control Module PCB Rev 5
Basler 8650C72 Exciter Control Module PCB Rev 5 -
 Basler C2EE1PA0N1F BE1-32R Reverse Power Relay
Basler C2EE1PA0N1F BE1-32R Reverse Power Relay -
 ADLINK HPCI-14S12U - Industrial Control Backplane 12PCI Backplane PCI-14S Passive Backplane
ADLINK HPCI-14S12U - Industrial Control Backplane 12PCI Backplane PCI-14S Passive Backplane -
-0010.png) ADLINK PCIe-GIE74C - image acquisition card 4-CH GigE Vision PoE+ Frame Grabber
ADLINK PCIe-GIE74C - image acquisition card 4-CH GigE Vision PoE+ Frame Grabber -
-0010_1.png) ADLINK PCI-8164 - control card 4-Axis Advanced Motion Controller Board
ADLINK PCI-8164 - control card 4-Axis Advanced Motion Controller Board -
 ADLINK PCIe-U304 - 4 Port USB3 PCIe Frame Grabbers USB Screw Hole Card
ADLINK PCIe-U304 - 4 Port USB3 PCIe Frame Grabbers USB Screw Hole Card -
 ADLINK PCI-9112 - Multi-Function Data Acquisition Card DAQ Card
ADLINK PCI-9112 - Multi-Function Data Acquisition Card DAQ Card -
 ADLINK PCI-7432 - 51-12013-0A50 4-CH Isolated Numérique I/O PCI Cartes Digital I/O Card
ADLINK PCI-7432 - 51-12013-0A50 4-CH Isolated Numérique I/O PCI Cartes Digital I/O Card -
 ADLINK PCA-6106P3-0C1 REV.C1 - backplane 6-Slot Passive Backplane Board
ADLINK PCA-6106P3-0C1 REV.C1 - backplane 6-Slot Passive Backplane Board -
 ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Board
ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Board -
 ADLINK CPCI-7433R(G) - Digital Input Board Rear I/O CompactPCI Card
ADLINK CPCI-7433R(G) - Digital Input Board Rear I/O CompactPCI Card -
 ADLINK EBP-13E4 - 51-46703-0A30 Industrial PC Backplane Passive Backplane
ADLINK EBP-13E4 - 51-46703-0A30 Industrial PC Backplane Passive Backplane -
 ADLINK PCIE-HDV62 - Image acquisition card High Definition Video Frame Grabber
ADLINK PCIE-HDV62 - Image acquisition card High Definition Video Frame Grabber -
 ADLINK EBP-13E4 - 51-46703-0A30 Industrial Backplane Board Passive Backplane
ADLINK EBP-13E4 - 51-46703-0A30 Industrial Backplane Board Passive Backplane -
 ADLINK 90111-B1 / CPCI-6770 - PCB CPU MODULE CompactPCI Single Board Computer
ADLINK 90111-B1 / CPCI-6770 - PCB CPU MODULE CompactPCI Single Board Computer -
 ADLINK PCI-7248 - DATA ACQUISITION PCI CARD 48-CH Parallel Digital I/O Board
ADLINK PCI-7248 - DATA ACQUISITION PCI CARD 48-CH Parallel Digital I/O Board -
 ADLINK PCI-7230 - 51-12003-0a50 board PCI7230 32-CH Isolated Digital I/O Card
ADLINK PCI-7230 - 51-12003-0a50 board PCI7230 32-CH Isolated Digital I/O Card -
 ADLINK PCI2A000CB - 51-20000-0B30 Multi-Function DAQ Card Baseboard
ADLINK PCI2A000CB - 51-20000-0B30 Multi-Function DAQ Card Baseboard -
 ADLINK PCI-8134-005 - 4-Axis Motion Controller Card
ADLINK PCI-8134-005 - 4-Axis Motion Controller Card -
 ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Card
ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Card -
 ADLINK PCI-7434 - 64-CH Isolated Digital Output Card
ADLINK PCI-7434 - 64-CH Isolated Digital Output Card -
 ADLINK PCI-8132 - motion control card 2-Axis Servo & Stepper Controller
ADLINK PCI-8132 - motion control card 2-Axis Servo & Stepper Controller -
 ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board
ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board -
 ADLINK PCI-8164 - Motion Control Card 51-12406-0A40 4-Axis Controller
ADLINK PCI-8164 - Motion Control Card 51-12406-0A40 4-Axis Controller -
 ADLINK 51-12001-0C20 - Circuit Board Data Acquisition Interface Module Hardware
ADLINK 51-12001-0C20 - Circuit Board Data Acquisition Interface Module Hardware -
 ADLINK NuPR0-840 - industrial control motherboard Full-Size PICMG CPU Board
ADLINK NuPR0-840 - industrial control motherboard Full-Size PICMG CPU Board -
 ADLINK PCI-7444 - 51-12023-0A10 card 128-CH Isolated Digital Output Board
ADLINK PCI-7444 - 51-12023-0A10 card 128-CH Isolated Digital Output Board -
 ADLINK PCI-1612B - data acquisition card 4-Port RS-232/422/485 Serial Communication Card
ADLINK PCI-1612B - data acquisition card 4-Port RS-232/422/485 Serial Communication Card -
 ADLINK PCI-6208V 009 - 8/16-CH 16-Bit Analog Output Cards PCB-I-E-482=6BX3
ADLINK PCI-6208V 009 - 8/16-CH 16-Bit Analog Output Cards PCB-I-E-482=6BX3 -
 ADLINK NUPRO-935A/LV - industrial control motherboard Full-Size PICMG SBC Board
ADLINK NUPRO-935A/LV - industrial control motherboard Full-Size PICMG SBC Board -
 ADLINK PCI-9114DG - Multi-Function DAQ Card Data Acquisition PCI Card
ADLINK PCI-9114DG - Multi-Function DAQ Card Data Acquisition PCI Card -
 ADLINK ACL-7130 - Data acquisition card Isolated Digital I/O Board
ADLINK ACL-7130 - Data acquisition card Isolated Digital I/O Board -
 ADLINK ABX-6300D-4E1-BP - board ABX6300D4E1BP Video Interface Expansion Card
ADLINK ABX-6300D-4E1-BP - board ABX6300D4E1BP Video Interface Expansion Card -
 ADLINK CPCI-6940 - CPCI-6940/D1539/M16-0(EA)-000E 6U CompactPCI Processor Board
ADLINK CPCI-6940 - CPCI-6940/D1539/M16-0(EA)-000E 6U CompactPCI Processor Board -
 ADLINK NuPRO-760 - industrial control motherboard Half-Size PICMG SBC CPU Board
ADLINK NuPRO-760 - industrial control motherboard Half-Size PICMG SBC CPU Board -
 ADLINK IMB-M42H (G)-0020 - industrial control motherboard LGA1155 Micro-ATX Mainboard
ADLINK IMB-M42H (G)-0020 - industrial control motherboard LGA1155 Micro-ATX Mainboard -
 ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board
ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board -
 ADLINK PCI-8134 - 4-Axis Servo & Stepper Motion Controller Card
ADLINK PCI-8134 - 4-Axis Servo & Stepper Motion Controller Card -
 ADLINK MXC-6101D - V.PC000.002.ST.00 Box PC Configurable Embedded Computer
ADLINK MXC-6101D - V.PC000.002.ST.00 Box PC Configurable Embedded Computer -
.png) ADLINK PCI-8134A - 51-12421-0A10 Motion Control Card 4-Axis Controller Card
ADLINK PCI-8134A - 51-12421-0A10 Motion Control Card 4-Axis Controller Card -
 ADLINK DIN-100S / DIN-100SA1 - Technology SCSI-II TB 100-PIN Terminal Block Board
ADLINK DIN-100S / DIN-100SA1 - Technology SCSI-II TB 100-PIN Terminal Block Board -
.png) ADLINK DIN-812M001 / DIN812M001 - 51-14034-0A1 51140340A1 Terminal Module Breakout Interface
ADLINK DIN-812M001 / DIN812M001 - 51-14034-0A1 51140340A1 Terminal Module Breakout Interface -
_1.png) ADLINK PCI-8164 - Servo motion control 4-Axis Advanced Controller Card
ADLINK PCI-8164 - Servo motion control 4-Axis Advanced Controller Card -
 ADLINK PCIe-GIE64 - Acquisition card GigE Vision PoE+ Frame Grabber
ADLINK PCIe-GIE64 - Acquisition card GigE Vision PoE+ Frame Grabber -
 ADLINK M-302 - Industrial control motherboard ATX PC Board Mainboard
ADLINK M-302 - Industrial control motherboard ATX PC Board Mainboard -
 ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board
ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board -
 ADLINK PCI-RTV24 - Image capture card Analog Video Frame Grabber
ADLINK PCI-RTV24 - Image capture card Analog Video Frame Grabber -
 ADLINK PCI-8102 - Motion control card 2-Axis Servo & Stepper Controller Board
ADLINK PCI-8102 - Motion control card 2-Axis Servo & Stepper Controller Board -
 ADLINK PCI-9112 REV.B1 - Card Multi-Function Data Acquisition Card
ADLINK PCI-9112 REV.B1 - Card Multi-Function Data Acquisition Card -
 ADLINK HSI-DI32-M-N / HSL-TB32-M-DIN - Discrete I/O MODULE Distributed Automation Module System
ADLINK HSI-DI32-M-N / HSL-TB32-M-DIN - Discrete I/O MODULE Distributed Automation Module System -
 ADLINK PCI-7296 - IO card REV.A3 96-CH Parallel Digital I/O Card
ADLINK PCI-7296 - IO card REV.A3 96-CH Parallel Digital I/O Card -
-0020.png) ADLINK DIN-814P-A4 / 814Y - terminal board Motion Control Interface Block
ADLINK DIN-814P-A4 / 814Y - terminal board Motion Control Interface Block -
 ADLINK DIN-814P-A4 - 51-14056-0A10 PCB-I-E-2736=ZA01 Screw Terminal Board Breakout
ADLINK DIN-814P-A4 - 51-14056-0A10 PCB-I-E-2736=ZA01 Screw Terminal Board Breakout -
 ADLINK M-322 - motherboard Industrial Control Computer Mainboard
ADLINK M-322 - motherboard Industrial Control Computer Mainboard -
 ADLINK NUPRO-406 REV:B1 - industrial control motherboard Full-Size PICMG CPU Board
ADLINK NUPRO-406 REV:B1 - industrial control motherboard Full-Size PICMG CPU Board -
 ADLINK AMP-204C - card DSP-Based 4-Axis Advanced Pulse-Train Controller
ADLINK AMP-204C - card DSP-Based 4-Axis Advanced Pulse-Train Controller -
 ADLINK HPCI14S REV.B1 - industrial computer baseboard 14-Slot Passive Backplane
ADLINK HPCI14S REV.B1 - industrial computer baseboard 14-Slot Passive Backplane





