
Teknic SSt-6000-U Digital Servo Drive
For years, Teknic has proven the benefits of tightly integrating servo compensation with torque control under the control of a dedicated DSP per axis. The latest in a line of high performance drives, the SSt-U series advances the state of the art by utilizing this topology in such a way to allow all information to be shared in real time so all system functions cooperate in any situation. For example, if the torque loop senses voltage saturation, that is instantly passed upstream to the servo compensator and the system delivers a coordinated response, maintaining elegant load control. The result is performance superior to other digital servo drives or analog torque amplifiers. OEMs will realize tighter tracking, immediate settling, and smooth motion - all of which yields superior machine throughput and reliability.
The 6000 has an open control interface and will work with almost any servo controller or indexer with little to no software change. Moreover, it will elegantly control permanent magnet servomotors from virtually any manufacturer.
Teknic SSt-6000-U Digital Servo Drive
The SSt-6000 is a high bandwidth, digital vector servo drive. The seamless integration of position, velocity, and torque loops enables this drive to provide surprising performance enhancements.
The SSt utilizes an adaptive control algorithm (IMT) based on neural fuzzy logic.
The IMT virtually eliminates the concern of inertia matching and allows for loads of large and varying inertia.
The SSt-6000-U uses small-signal, sliding-mode, automatic gain modulation to eliminate hunting even with extreme gains.
Axes will be perfectly still and have no loss of accuracy.
Some systems are high performance and others easy to use.
Few are both. The SSt’s cascading PIV control structure provides cutting edge performance with ease of use.
Even the sophisticated RAS, IMT, and Anti-Hunt are easy to set up
Key technical specifications
Basic and environmental parameters
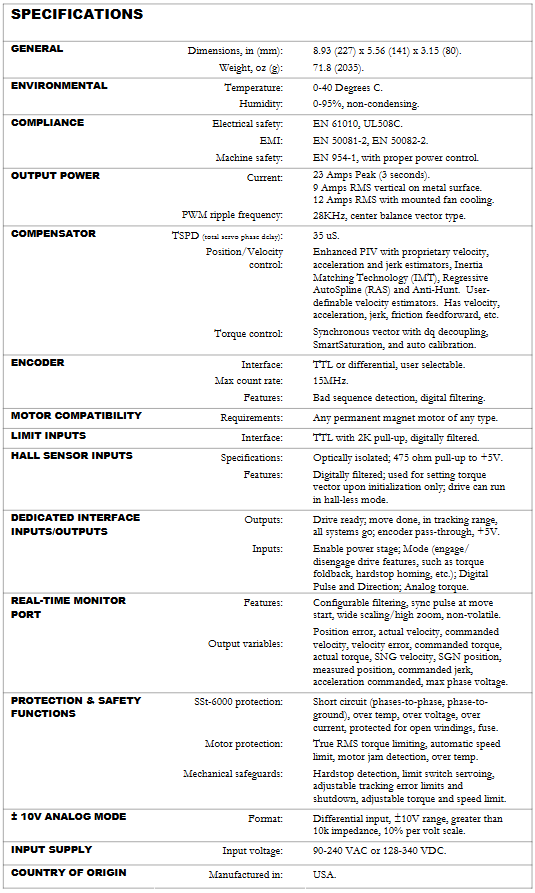
Physical dimensions and weight - Dimensions: 8.93 x 5.56 x 3.15 inches (227 x 141 x 80 mm)
-Weight: 71.8 ounces (2035 g)
Working environment - Temperature: 0~40 ℃ (no condensation)
-Humidity: 0~95% RH (non condensing)
-Installation: Vertical installation on metal surface (with reserved heat dissipation space)
Compliance - Electrical Safety: EN 61010, UL 508C
-Electromagnetic compatibility (EMC): EN 50081-2 (emission), EN 50082-2 (anti-interference)
-Mechanical safety: EN 954-1 (requires compliant power control)
Power output and motor compatibility
Output current - peak current: 23 A (continuous for 3 seconds)
-Rated current: 9 A RMS (vertically installed on metal surface), 12 A RMS (with fan cooling)
PWM characteristics: 28 kHz center balanced vector PWM ripple frequency, reducing motor operating noise and heat generation
Motor compatibility supports almost all manufacturers' permanent magnet motors (without electrical restrictions), including:
-Rotary/linear servo motor, brushed/brushless motor
-Special types such as galvanometer motors and voice coil motors
3. Control performance and algorithms
Total servo phase delay (TSPD) 35 μ s (industry-leading, fully deterministic delay from position feedback reading to motor torque update)
Control closed-loop three loop collaboration (position+speed+torque), supporting:
-Position mode: Tracking error compensation, zero setting time (≤ 1 ms, requiring mechanical bandwidth matching)
-Speed mode: adaptive load inertia, anti resonance
-Torque mode: synchronous vector control, DQ decoupling, SmartSaturation (maintaining control stability when voltage/current saturates)
Core algorithm - IMT (Inertial Matching Technology): Adaptive control based on neural fuzzy logic, eliminating inertia matching concerns and adapting to large/variable inertia loads
-RAS (Regression Automatic Spline): jerk (Acceleration) restricts trajectory planning to reduce impact, vibration, and wear
-Anti Hunt: Small signal sliding mode automatic gain modulation to avoid axis oscillation under high gain conditions
-Multi order feedforward compensation: improves tracking accuracy without the noise and torque jitter of traditional feedforward
4. Feedback and Interface
Encoder Interface - Type: TTL/Differential (User Optional)
-Maximum count rate: 15 MHz
-Function: Fault sequence detection, digital filtering, support for position recovery
Hall sensor interface - isolation: photoelectric isolation, 475 Ω pull-up to+5V
-Function: Used only for torque vector setting during initialization, supports no Hall mode operation
Dedicated I/O interface - Output: Drive ready, motion completed, within tracking range, encoder pass through,+5V power supply
-Input: power level enable, mode selection (torque return, hard limit return to zero, etc.), digital pulse/direction command, analog torque command
Analog input (± 10V) differential input, impedance>10 k Ω, scaling ratio 10%/V, used for simulating torque command input
The real-time monitoring port can be configured with filtering and synchronization pulses, and the output variables include position error, actual/commanded speed, torque, acceleration, maximum phase voltage, etc. It supports non-volatile storage
5. Power Supply and Protection
Input power supply wide voltage adaptation: 90~240 VAC or 128~340 VDC (no need to manually switch voltage levels)
Driver Protection - Electrical Protection: Short Circuit (Phase to Phase/Relative Ground), Over Temperature, Over Voltage, Over Current, Winding Open Circuit Protection, Fuse
-Motor protection: true RMS torque limit, automatic speed limit, motor stalling detection, over temperature protection
Mechanical safety protection hard limit detection, limit switch servo control, adjustable tracking error limit and shutdown, adjustable torque/speed limit
Core functions and advantages
1. High precision motion control capability
Zero setting time: For point-to-point motion scenarios, under the premise of mechanical bandwidth matching, the setting time is ≤ 1 ms, greatly improving device throughput;
Ultra smooth trajectory: RAS technology generates jerk limited motion curves, which can reduce equipment vibration, noise, and mechanical wear even at high speeds;
Anti interference and stability: The Anti Hunt algorithm eliminates shaft oscillations under high gain, ensuring no drift and no loss of accuracy when the shaft is stationary.
2. Flexible integration and ease of use
Plug and play compatibility: The digital trajectory command interface is compatible with most indexes/servo controllers, requiring no or only a small amount of software modification, and can directly replace stepper drivers;
Universal motor control: No manufacturer/type restrictions, supports brushed/brushless, rotary/linear motors, reducing OEM stocking and adaptation costs;
Simplify debugging and maintenance:
Collaborate with Teknic QuickSet ™ Tools that provide mechanical system diagnosis and reduce early failures caused by assembly errors;
Logical power backup (DSP still works when the main power is disconnected), power failure location recovery (no need to reset to zero), to improve equipment fault tolerance and operation efficiency;
Built in cable/sensor fault detection (including intermittent problem capture) simplifies troubleshooting.
3. Safety and reliability
Full scenario protection: multi-layer protection from electrical (overcurrent/overvoltage), motor (stalling/overheating) to mechanical (hard limit/tracking error) to avoid equipment damage;
True RMS torque limit: Compared to traditional I ² t or temperature controllers, it is more precise in preventing motor burnout and does not require additional wiring or sensors;
EMI optimization: QuietDesign ™ The electromagnetic interference suppression system can meet CE certification without the need for shielding clamps or ferrite cores, reducing wiring complexity.
Typical application scenarios
Precision machine tools: zero setting time and high tracking accuracy, suitable for precise control of tool paths;
Automated assembly line: with torque reversal and force control functions, suitable for contact operations such as part insertion and pressing;
Semiconductor equipment: low latency and anti vibration characteristics, meeting high-precision motion requirements such as wafer handling and photolithography;
Alternative stepper system: Directly replace the stepper driver to improve motion smoothness and positioning accuracy without modifying the original controller software.
- OMRON
- ABB
- General Electric
- EMERSON
- Honeywell
- HIMA
- ALSTOM
- Rolls-Royce
- MOTOROLA
- Rockwell
- Siemens
- Woodward
- YOKOGAWA
- FOXBORO
- KOLLMORGEN
- MOOG
- KB
- YAMAHA
- BENDER
- TEKTRONIX
- Westinghouse
- AMAT
- AB
- XYCOM
- Yaskawa
- B&R
- Schneider
- KONGSBERG
- NI
- WATLOW
- ProSoft
- SEW
- ADVANCED
- Reliance
- TRICONEX
- METSO
- MAN
- Advantest
- STUDER
- DANAHER MOTION
- Bently
- Galil
- EATON
- MOLEX
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- Beijer
- Moxa
- Rexroth
- Johnson
- WAGO
- TOSHIBA
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- Application field
- XP POWER
- CTI
- TRICON
- STOBER
- Thinklogical
- Horner Automation
- Meggitt
- Fanuc
- Baldor
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- Iba
- Beckhoff
-
 OMRON B7AM-8B16 I/O Terminal Block
OMRON B7AM-8B16 I/O Terminal Block -
 Fanuc A06B-6110-H026 Power Supply Module
Fanuc A06B-6110-H026 Power Supply Module -
 Schneider TSXETG3021 Ethernet Gateway
Schneider TSXETG3021 Ethernet Gateway -
 OMRON CS1W-CLK21-V1 Controller Link Unit
OMRON CS1W-CLK21-V1 Controller Link Unit -
 NP1W6406T-Z704 PLC I/O Module
NP1W6406T-Z704 PLC I/O Module -
 OMRON CJ1W-DA08C Analog Output Module
OMRON CJ1W-DA08C Analog Output Module -
 Yaskawa 3G3HV-A4022-CE AC Drive
Yaskawa 3G3HV-A4022-CE AC Drive -
 OMRON NB7W-TW01B CP1L-EL20DR-D Power Panel
OMRON NB7W-TW01B CP1L-EL20DR-D Power Panel -
 OMRON C500-NC103-E Position Control Unit
OMRON C500-NC103-E Position Control Unit -
 Steag Hamatech PLC DCS Servo Control System
Steag Hamatech PLC DCS Servo Control System -
 Siemens 6SN1123-1AA00-0DA1 Power Supply Module
Siemens 6SN1123-1AA00-0DA1 Power Supply Module -
 GE IC693CHS391H CPU & AD693CMM301A PLC Module
GE IC693CHS391H CPU & AD693CMM301A PLC Module -
 Siemens 6FC5303-0AF23-1AA1 PLC Control Panel
Siemens 6FC5303-0AF23-1AA1 PLC Control Panel -
 Square D CM4000T PowerLogic Circuit Monitor J1 F16
Square D CM4000T PowerLogic Circuit Monitor J1 F16 -
 Siemens 6FX5002-5DG10-1BA0 MOTION-CONNECT 500 Cable
Siemens 6FX5002-5DG10-1BA0 MOTION-CONNECT 500 Cable -
 Schmersal SRB324ST 101195504 Safety Relay 24V
Schmersal SRB324ST 101195504 Safety Relay 24V -
 Mitsubishi 15050-PR02A PLC Circuit Board Module
Mitsubishi 15050-PR02A PLC Circuit Board Module -
 OMRON CQM1-AD041 Analog Input PLC Module
OMRON CQM1-AD041 Analog Input PLC Module -
 Beckhoff EL5042 EtherCAT PLC Terminal Module
Beckhoff EL5042 EtherCAT PLC Terminal Module -
 OMRON C200HW-MC402-E Motion Control Unit
OMRON C200HW-MC402-E Motion Control Unit -
 C36TC0UA1100 Industrial Temperature Controller
C36TC0UA1100 Industrial Temperature Controller -
 NL8048BC24 12 Industrial Control LCD Module
NL8048BC24 12 Industrial Control LCD Module -
 OMRON R88D Servo Drive and Motor System
OMRON R88D Servo Drive and Motor System -
 OMRON CS1W CLK21 V1 Controller Link Module
OMRON CS1W CLK21 V1 Controller Link Module -
 OMRON YASKAWA R7M A20030 S1 D Servo Motor
OMRON YASKAWA R7M A20030 S1 D Servo Motor -
 SIEMENS 6AV2128 3KB06 0AX1 Unified Comfort Panel
SIEMENS 6AV2128 3KB06 0AX1 Unified Comfort Panel -
 Schneider Electric METSEPM8240 PowerLogic Meter
Schneider Electric METSEPM8240 PowerLogic Meter -
 Advanced AMCI 1PLC 1 31F Programmable Limit Switch
Advanced AMCI 1PLC 1 31F Programmable Limit Switch -
 ABB PM582 ETH Programmable Logic Processor
ABB PM582 ETH Programmable Logic Processor -
 SIEMENS 6FC5110 0CB01 0AA0 CPU Control Board
SIEMENS 6FC5110 0CB01 0AA0 CPU Control Board -
 Schleicher P03GS13A CPU Module
Schleicher P03GS13A CPU Module -
 Siemens 6SN1123-1AA00-0BA1 Power Module
Siemens 6SN1123-1AA00-0BA1 Power Module -
 Mitsubishi A1S61PN Power Supply Module
Mitsubishi A1S61PN Power Supply Module -
 Yaskawa CPS-IONB DC Power Supply Module
Yaskawa CPS-IONB DC Power Supply Module -
 Siemens 6ES7215-2BD00 CPU 215-2
Siemens 6ES7215-2BD00 CPU 215-2 -
 Mitsubishi A2ACPU MELSEC PLC System Kit
Mitsubishi A2ACPU MELSEC PLC System Kit -
 ProSoft 3150-MCM Communication Module
ProSoft 3150-MCM Communication Module -
 Mitsubishi OSE104ET Incremental Encoder
Mitsubishi OSE104ET Incremental Encoder -
 OMRON CJ1W-AD081-V1 Analog Input Module
OMRON CJ1W-AD081-V1 Analog Input Module -
 Broadcom BCM5464A1KRB Quad Port Ethernet IC
Broadcom BCM5464A1KRB Quad Port Ethernet IC -
 Modicon M221-24IO TM221C24 PLC 24 PNP Transistor
Modicon M221-24IO TM221C24 PLC 24 PNP Transistor -
 Allen-Bradley 1321-3R160-B Line Reactor 3R160B
Allen-Bradley 1321-3R160-B Line Reactor 3R160B -
 Beckhoff CX1020-0012 Embedded PLC Module Specs
Beckhoff CX1020-0012 Embedded PLC Module Specs -
 Turck BL20-PF-24VDC-D Power Feed Module Specs
Turck BL20-PF-24VDC-D Power Feed Module Specs -
 Siemens 6SY7000-0AC37 Power Supply Module
Siemens 6SY7000-0AC37 Power Supply Module -
 Yaskawa SGDH-10DE-OY 1kW 400V Servo Drive Specs
Yaskawa SGDH-10DE-OY 1kW 400V Servo Drive Specs -
 Omron 3G3SV-BB015-E 1.5kW 220V VFD Specs
Omron 3G3SV-BB015-E 1.5kW 220V VFD Specs -
 Uni-Pro CPU91-PLC J 23.020167X Processor Module
Uni-Pro CPU91-PLC J 23.020167X Processor Module -
 PASABAN MTC-3044 PLC Rack Power Supply 4835-A
PASABAN MTC-3044 PLC Rack Power Supply 4835-A -
 XYCOM 3015T Operator Interface Panel BIN4.4.4
XYCOM 3015T Operator Interface Panel BIN4.4.4 -
 OMRON CJ1W-MD261 Mixed I/O Module
OMRON CJ1W-MD261 Mixed I/O Module -
 Omron NJ301-1100 PLC CPU eCat EIP Specs
Omron NJ301-1100 PLC CPU eCat EIP Specs -
 Omron F500-C15-ETN Vision System PLC Module
Omron F500-C15-ETN Vision System PLC Module -
 Modicon M241-24IO TM/T2UK PLC with Ethernet
Modicon M241-24IO TM/T2UK PLC with Ethernet -
 SIXNET YS-800-001 RTU PLC Module
SIXNET YS-800-001 RTU PLC Module -
 BEMAC UST-202-D Interface Board 1307D V08B2
BEMAC UST-202-D Interface Board 1307D V08B2 -
 Yaskawa JANCD-MMOIC-02 Drive Circuit Board
Yaskawa JANCD-MMOIC-02 Drive Circuit Board -
 ABB 3BSE005028R1 SDCS-COM-1 Comm Board
ABB 3BSE005028R1 SDCS-COM-1 Comm Board -
 Omron 3G3MX2-A4110 A4150 Inverter Drives Specs
Omron 3G3MX2-A4110 A4150 Inverter Drives Specs -
 KEYENCE CA-E100 PLC Module
KEYENCE CA-E100 PLC Module -
 GE IC693ALG223-GB Analog Input Module Specs
GE IC693ALG223-GB Analog Input Module Specs -
 ABB BAILEY IMMFP01 Multi Function Processor System
ABB BAILEY IMMFP01 Multi Function Processor System -
 SIEMENS 6FC5372 0AA00 0AA1 NCU 7202 Controller
SIEMENS 6FC5372 0AA00 0AA1 NCU 7202 Controller -
Modicon TM241CE4 40I O Transistor Programmable Controller
-
 SIEMENS 6ES7 315 2EH13 0AB0 CPU 3152 PN DP
SIEMENS 6ES7 315 2EH13 0AB0 CPU 3152 PN DP -
 NORIS A1 91 PCB Card Rack Module System
NORIS A1 91 PCB Card Rack Module System -
 SIEMENS 6ES7 313 5BE01 0AB0 Compact CPU
SIEMENS 6ES7 313 5BE01 0AB0 Compact CPU -
 SCHNEIDER ELECTRIC S144B MICROLOGIC 60A Trip Unit
SCHNEIDER ELECTRIC S144B MICROLOGIC 60A Trip Unit -
 CNI PLC269 v3 Control Module Board Rev H
CNI PLC269 v3 Control Module Board Rev H -
ABB BAILEY IIMCP02 Processor Module
-
 OMRON NT20S ST121 EV3 Operator Interface Terminal
OMRON NT20S ST121 EV3 Operator Interface Terminal -
 OMRON NS-CA001 Video Input Unit
OMRON NS-CA001 Video Input Unit -
 GE Fanuc IC695CHS012 RX3i Backplane
GE Fanuc IC695CHS012 RX3i Backplane -
 Allen Bradley 2711E-K14C6 PanelView 1400e Terminal
Allen Bradley 2711E-K14C6 PanelView 1400e Terminal -
 Siemens Sinamics CCB 10000432.71 Power Cell
Siemens Sinamics CCB 10000432.71 Power Cell -
 Siemens 6SL3210-1SE21-8UA0 Power Module PM340
Siemens 6SL3210-1SE21-8UA0 Power Module PM340 -
 Yaskawa CIMR-F7A20P4 AC Drive
Yaskawa CIMR-F7A20P4 AC Drive -
 Beckhoff EP1918-0002 EtherCAT Box I/O Module
Beckhoff EP1918-0002 EtherCAT Box I/O Module -
 OMRON CQM1-TC001 Temperature Control Module
OMRON CQM1-TC001 Temperature Control Module -
 GE Fanuc SGHA36AT0400 Industrial Contactor
GE Fanuc SGHA36AT0400 Industrial Contactor -
 OMRON NJ501-1500 PLC Machine Automation Controller
OMRON NJ501-1500 PLC Machine Automation Controller -
 Mitsubishi MAZAK QX084 Power Supply MELDAS 500 CNC
Mitsubishi MAZAK QX084 Power Supply MELDAS 500 CNC -
 B&R 0AC808.9 PLC Automation Module
B&R 0AC808.9 PLC Automation Module -
 OMRON CP1H-XA40DT1-D PLC Module
OMRON CP1H-XA40DT1-D PLC Module -
 G&W Electric PLC15 5111 011 15kV Capnut Assembly
G&W Electric PLC15 5111 011 15kV Capnut Assembly -
 GE DS200SLCCG3AGH PCB Circuit Board
GE DS200SLCCG3AGH PCB Circuit Board -
 Siemens SINUMERIK 6FC3981-4FD PLC Extension
Siemens SINUMERIK 6FC3981-4FD PLC Extension -
 OMRON F300-DC I/O Image Processing Unit
OMRON F300-DC I/O Image Processing Unit -
 FANUC A06B-0314-B002 AC Servo Motor
FANUC A06B-0314-B002 AC Servo Motor -
 GC-S84 Programmable Controller Logic Module
GC-S84 Programmable Controller Logic Module -
 PASABAN MONTELEC MTC3001-DC Drive Control PLC
PASABAN MONTELEC MTC3001-DC Drive Control PLC -
 Allen Bradley 100E460EJ11 Auxiliary Contactor
Allen Bradley 100E460EJ11 Auxiliary Contactor -
 Bosch Rexroth 1070075337-101 Card Parameters
Bosch Rexroth 1070075337-101 Card Parameters -
 HMS Anybus AB7646-F Gateway Specifications
HMS Anybus AB7646-F Gateway Specifications -
 Bosch 062633-303401 CNC Servo PLC Card
Bosch 062633-303401 CNC Servo PLC Card -
 TI 500-5023 Series PLC Power Supply
TI 500-5023 Series PLC Power Supply -
 Siemens C98043-A7002-L1-12 Circuit Board
Siemens C98043-A7002-L1-12 Circuit Board -
 Omron E5CC-RX3A5M-000 Controller
Omron E5CC-RX3A5M-000 Controller -
 CN-8032-L Profinet Network Adapter Module
CN-8032-L Profinet Network Adapter Module -
 Siemens 3TK2804-0BB4 Safety Relay Details
Siemens 3TK2804-0BB4 Safety Relay Details -
 Toledo TTLM-2-1M I/O Load Module
Toledo TTLM-2-1M I/O Load Module -
 NORIS A1-91 PLC Rack Board Specifications
NORIS A1-91 PLC Rack Board Specifications -
 Mitsubishi A3ACPUR21 MELSEC PLC CPU Module
Mitsubishi A3ACPUR21 MELSEC PLC CPU Module -
 Beckhoff EP7041‑3002 EtherCAT Box Digital Input Module
Beckhoff EP7041‑3002 EtherCAT Box Digital Input Module -
 REER EOS2E 1053 EOS2R 1053 Safety Light Curtain
REER EOS2E 1053 EOS2R 1053 Safety Light Curtain -
 Mitsubishi Q80BD-J71BR11 MELSECNET/H Interface Board
Mitsubishi Q80BD-J71BR11 MELSECNET/H Interface Board -
 Omron 3G3IV-B4220-EV2 VFD 400V 22kW
Omron 3G3IV-B4220-EV2 VFD 400V 22kW -
 Allen-Bradley 96844671 1785-LT3 PLC-5/12 Processor Module
Allen-Bradley 96844671 1785-LT3 PLC-5/12 Processor Module -
 Pasaban MTC3001-DC Drive Control PLC Module
Pasaban MTC3001-DC Drive Control PLC Module -
 Omron CJ1M-CPU11 V4.0 PLC CPU Module
Omron CJ1M-CPU11 V4.0 PLC CPU Module -
 ABB CM579-PNIO B3 Communication Module
ABB CM579-PNIO B3 Communication Module -
 B&R X20 AI 4221 Analog Module
B&R X20 AI 4221 Analog Module -
 Siemens 6SY7000-0AC80 PLC Module
Siemens 6SY7000-0AC80 PLC Module -
 GE 531X300CCHAFM5 Control Card
GE 531X300CCHAFM5 Control Card -
 AB 810-A15C Inverse Time Relay
AB 810-A15C Inverse Time Relay -
 WITTENSTEIN LP120X-MF2-20 Planetary Gear
WITTENSTEIN LP120X-MF2-20 Planetary Gear -
 Mitsubishi Kakoki E-01B-4130 PLC I/O Modules
Mitsubishi Kakoki E-01B-4130 PLC I/O Modules -
 ABB DSQC643 Safety Control Board
ABB DSQC643 Safety Control Board -
 Siemens G26004-A2105-P100-2 PCB
Siemens G26004-A2105-P100-2 PCB -
 OMRON F350-C10E Image Processing Unit
OMRON F350-C10E Image Processing Unit -
 FUJI UG430H-TS1 HMI Touch Panel
FUJI UG430H-TS1 HMI Touch Panel -
 Westronics CB100188-01 Rev F Board
Westronics CB100188-01 Rev F Board -
 Siemens 7MH4900-3AA01 Weighing Module
Siemens 7MH4900-3AA01 Weighing Module -
 Gilbert & Nash Tracker 2000 Control Cabinet
Gilbert & Nash Tracker 2000 Control Cabinet -
 OMRON CJ1M-CPU22 CPU Unit
OMRON CJ1M-CPU22 CPU Unit -
 OMRON F3SJ-E0625P25 Light Curtain
OMRON F3SJ-E0625P25 Light Curtain -
 Siemens 3VA2340-5HL32-0AA0 Breaker
Siemens 3VA2340-5HL32-0AA0 Breaker -
 Mitsubishi Melsec A61P A2NCPU PLC System
Mitsubishi Melsec A61P A2NCPU PLC System





