
Aerotech EDU176 Ndrive HL series digital servo drive
Aerotech EDU176 Ndrive HL series digital servo drive
Product basic information
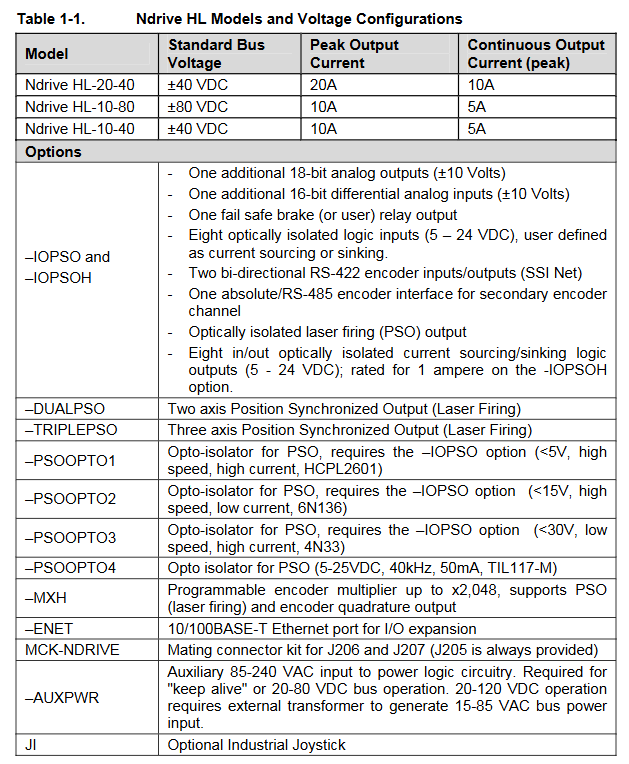
The manual begins by introducing the basic overview of the Ndrive HL series digital servo drive, including the product's functional positioning as a high-performance discrete drive option for the Automation 3200 motion system. It can drive various types of motors (brushless motor, brushed DC motor, and stepper motor) and perform current loop and servo loop closure to ensure positioning performance and speed stability. At the same time, basic information such as the version of the manual (Revision: 1.08b), release date (October 31, 2007), and related product number (P/N EDU176) were clarified.
System installation and configuration
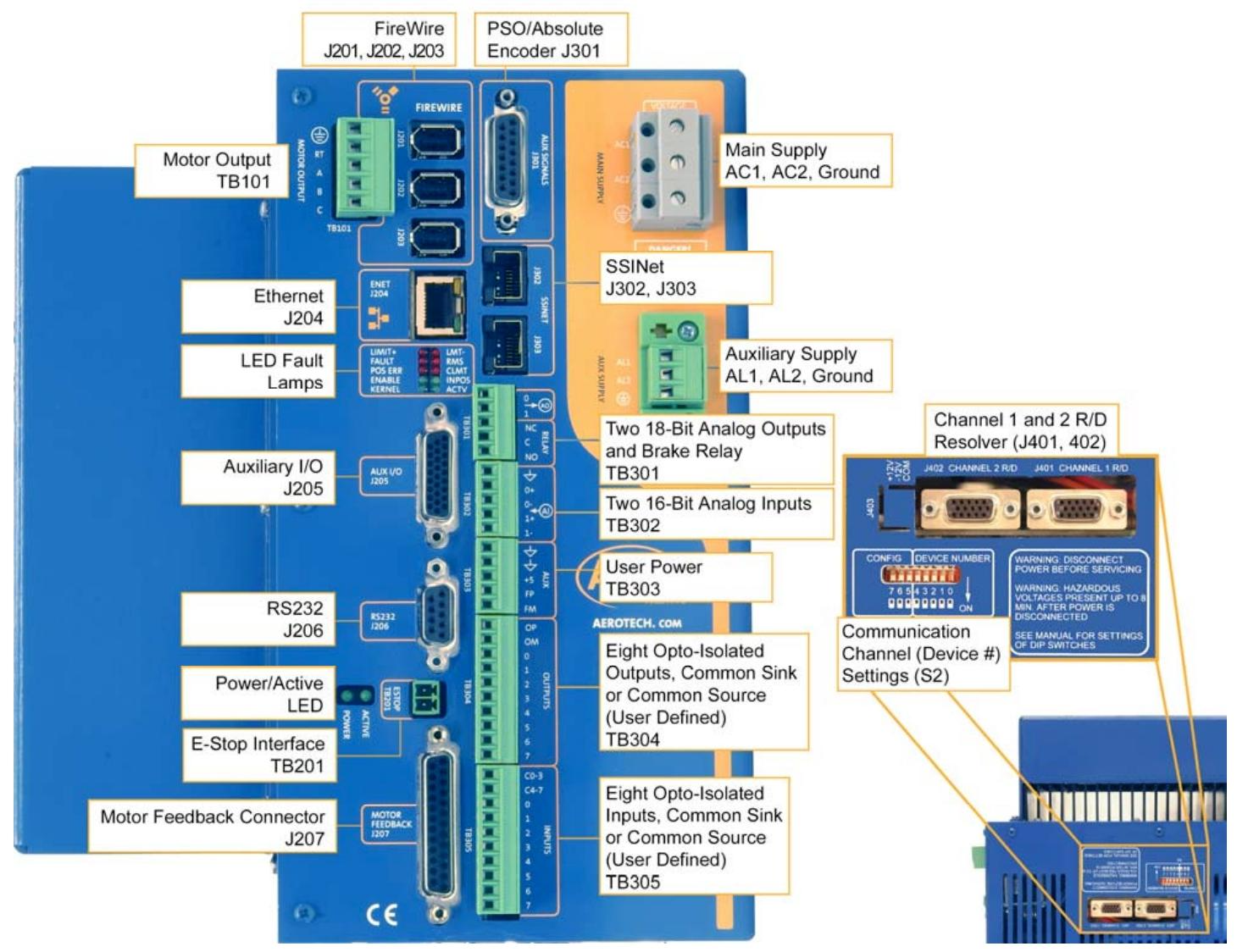
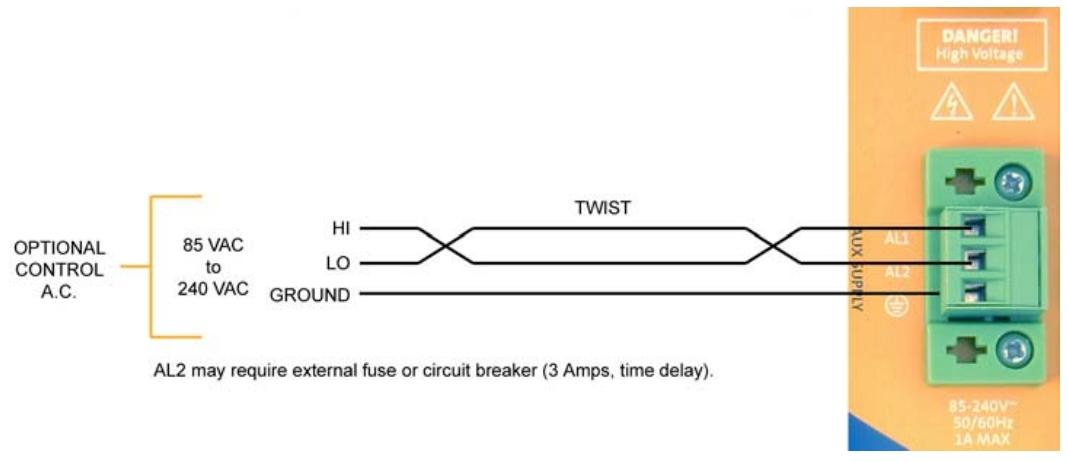
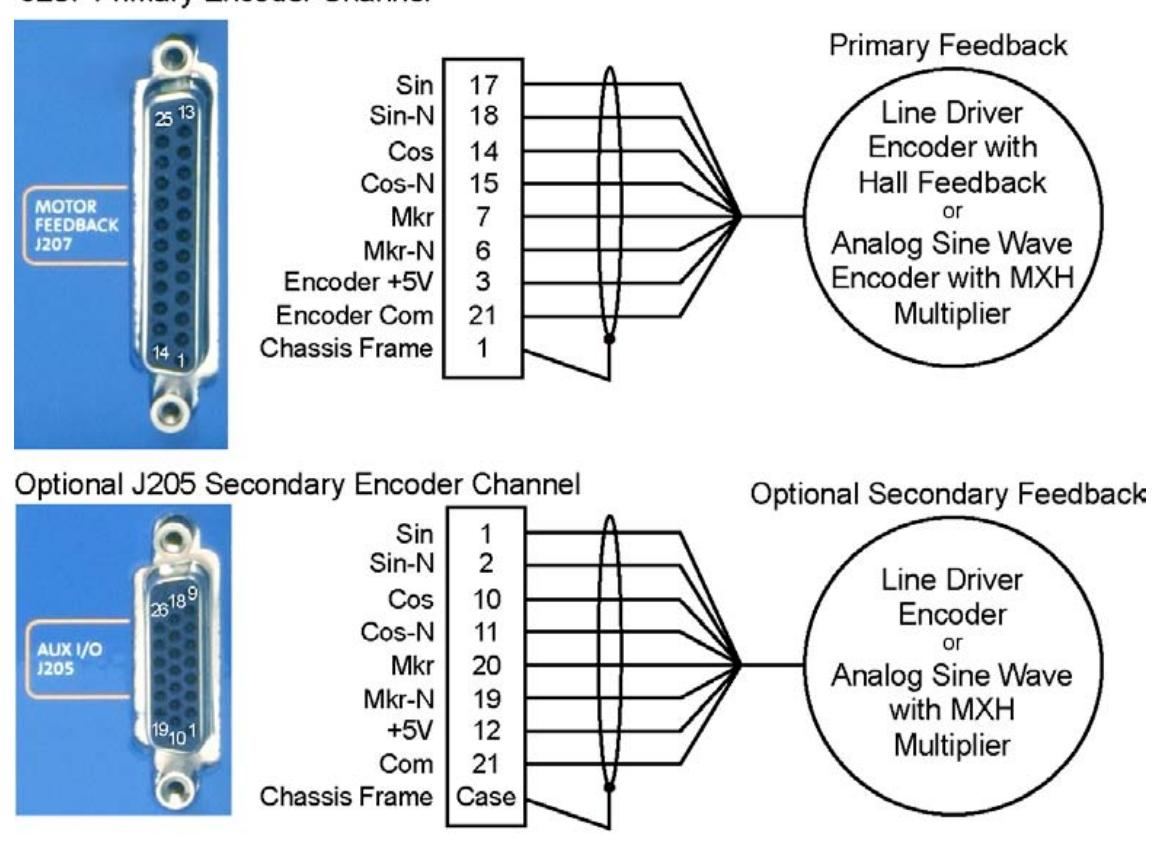
This section is an important component of the manual, detailing the specific steps and requirements for product installation and configuration. Including safety operating procedures, emphasizing precautions such as preventing electric shock and mechanical injury that must be followed during installation; The power connection method explains the wiring method, required wire specifications, and related protective measures for the motor power supply and control power supply (- AUXPWR option); Detailed wiring diagrams and phase adjustment methods are provided for different types of motors such as brushed DC motors, brushless motors, and stepper motors, including motor and feedback connections; Encoder feedback connection, introducing the phase adjustment and signal wiring of the encoder; And network configuration related content such as communication channel settings and multi drive connections.
Technical Details Explanation
Deeply analyzed the technical details of the Ndrive HL series products. Covering the pin allocation and functionality of the auxiliary I/O interface (J205), including analog input/output, digital input/output, and secondary encoder channels; Position synchronization output (PSO)/laser triggering function, explaining the working principle, triggering method, supported number of axes, and related parameter configuration of PSO; The pin definition of the motor feedback interface (J207) involves encoder signals, Hall effect signals, limit switch signals, etc; Communication protocol and pin allocation between RS-232/RS-422 ports and FireWire bus; It also includes parameter settings, hardware configuration, and fault handling for voltage current mode operation.
Optional Features and Accessories
Introduced the optional options and related accessories of the product. The optional options include - IOPSO and - IOPSOH expansion boards, - DUALPSO and - TRIPLEPSO laser triggering options, - ENET (Ethernet) options, - RDP rotary transformer input options, etc. The functions, hardware composition, and configuration methods of each option are described in detail. The attachment section lists the models, descriptions, and applicable scenarios of standard interconnect cables, as well as the connection methods for joystick and handwheel interfaces.
Troubleshooting and Maintenance
Provided diagnosis and solutions for common faults, listed in table form the possible causes and countermeasures for faults such as motor loss of control, amplifier alarm, overcurrent, overtemperature, etc; Introduced the testing points, jumper settings, and fuse information for key components such as the control board, motor power board, and power supply board; Explained the meaning of LED indicator lights, helping users determine the operating status of the device through the status of the indicator lights; It also includes recommendations for preventive maintenance, such as regularly checking cable connections, cleaning equipment, etc.
- OMRON
- ABB
- General Electric
- EMERSON
- Honeywell
- HIMA
- ALSTOM
- Rolls-Royce
- MOTOROLA
- Rockwell
- Siemens
- Woodward
- YOKOGAWA
- FOXBORO
- KOLLMORGEN
- MOOG
- KB
- YAMAHA
- BENDER
- TEKTRONIX
- Westinghouse
- AMAT
- AB
- XYCOM
- Yaskawa
- B&R
- Schneider
- KONGSBERG
- NI
- WATLOW
- ProSoft
- SEW
- ADVANCED
- Reliance
- TRICONEX
- METSO
- MAN
- Advantest
- STUDER
- DANAHER MOTION
- Bently
- Galil
- EATON
- MOLEX
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- Beijer
- Moxa
- Rexroth
- Johnson
- WAGO
- TOSHIBA
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- Application field
- XP POWER
- CTI
- TRICON
- STOBER
- Thinklogical
- Horner Automation
- Meggitt
- Fanuc
- Baldor
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- Iba
- Beckhoff
-
 Basler Electric DECS-200-1L Digital Excitation Control System
Basler Electric DECS-200-1L Digital Excitation Control System -
 Basler DECS125-15-B2C1 Excitation Control
Basler DECS125-15-B2C1 Excitation Control -
 Basler 9507900205 SSR Retrofit Voltage Regulator
Basler 9507900205 SSR Retrofit Voltage Regulator -
 Basler BE2000E Digital Voltage Regulator
Basler BE2000E Digital Voltage Regulator -
 Basler BE1-GPS Generator Protection System
Basler BE1-GPS Generator Protection System -
 Basler DECS-250-CN1CN1N Digital Excitation Control
Basler DECS-250-CN1CN1N Digital Excitation Control -
 Basler DGC-2020 Genset Controller
Basler DGC-2020 Genset Controller -
 Basler BE1-81O UT3ED1LA7N0F Frequency Relay (Variant)
Basler BE1-81O UT3ED1LA7N0F Frequency Relay (Variant) -
 Basler BE1-81O UT3EE1YA9S0F Frequency Relay (Variant)
Basler BE1-81O UT3EE1YA9S0F Frequency Relay (Variant) -
 Basler BE1-81O Over/Under Frequency Relay
Basler BE1-81O Over/Under Frequency Relay -
 Basler DECS125-15 Digital Excitation Control
Basler DECS125-15 Digital Excitation Control -
 Basler Electric BE1-951 Overcurrent Protection System
Basler Electric BE1-951 Overcurrent Protection System -
 Basler Electric BE1-700V Digital Protective Relay
Basler Electric BE1-700V Digital Protective Relay -
 Basler Electric APR63-5 Automatic Voltage Regulator
Basler Electric APR63-5 Automatic Voltage Regulator -
 Basler Electric BE1-851 Overcurrent Protection System
Basler Electric BE1-851 Overcurrent Protection System -
 Basler Electric DECS-250-LN1SN1N Excitation Control
Basler Electric DECS-250-LN1SN1N Excitation Control -
 Basler Electric BE1-87T Transformer Differential Relay
Basler Electric BE1-87T Transformer Differential Relay -
 Basler Electric DECS-200-1L Excitation Control System
Basler Electric DECS-200-1L Excitation Control System -
 Basler Electric 9310300100 DECS-300 Excitation Control
Basler Electric 9310300100 DECS-300 Excitation Control -
 Basler Electric SSE-N 125-4.5KW Shunt Exciter Regulator
Basler Electric SSE-N 125-4.5KW Shunt Exciter Regulator -
 Basler Electric DGC-2020HD-5NS1DNSBA Genset Controller
Basler Electric DGC-2020HD-5NS1DNSBA Genset Controller -
Basler Electric BE1-81-O/UT3EE1JB7N1F Frequency Relay
-
 Basler Electric BE1-81T1EE1WA0N1F Frequency Relay
Basler Electric BE1-81T1EE1WA0N1F Frequency Relay -
 Basler Electric BE1-25M1EA6PN5R1F Sync-Check Relay
Basler Electric BE1-25M1EA6PN5R1F Sync-Check Relay -
 Basler Electric BE1-GPS Generator Protection System
Basler Electric BE1-GPS Generator Protection System -
Basler Electric DECS-250-LN1SN1N Excitation Control Rev V
-
 Basler Electric DECS-250-CN2CN1N Excitation Control
Basler Electric DECS-250-CN2CN1N Excitation Control -
 Basler Electric BE1-50/51B-207 Overcurrent Relay
Basler Electric BE1-50/51B-207 Overcurrent Relay -
Basler Electric DECS-300-C0N0 Excitation Control System
-
Basler Electric DECS-200 Digital Excitation Control System
-
Basler Electric DECS-250-LN1CN1N Excitation Unit
-
Basler Electric DECS-250 LN2SA1D Excitation Unit Specs
-
Basler Electric BE1-87T Transformer Relay Review
-
Basler Electric BE1-11 Protection System
-
Basler Electric BE1-GPS100-E4N1H1N Protection System
-
 Allen-Bradley 442G-MABH-R Safety Module
Allen-Bradley 442G-MABH-R Safety Module -
 Beckhoff CX1030-0111 PLC Assembly Profile
Beckhoff CX1030-0111 PLC Assembly Profile -
 FANUC IC693CPU364 PLC Module
FANUC IC693CPU364 PLC Module -
 Orange Denmark Type 200816 220 PLC Specs
Orange Denmark Type 200816 220 PLC Specs -
 OMRON C200H-SNT31 Sysmac PLC Module
OMRON C200H-SNT31 Sysmac PLC Module -
 Allen Bradley 20AB022A3AYNANC0 PowerFlex 70
Allen Bradley 20AB022A3AYNANC0 PowerFlex 70 -
 OMRON C200HW-PCU01 Position Control Unit
OMRON C200HW-PCU01 Position Control Unit -
 ABB AO845A-eA Analog Output Module
ABB AO845A-eA Analog Output Module -
 OMRON CJ1M-CPU22 CPU Unit
OMRON CJ1M-CPU22 CPU Unit -
 Allen Bradley 100-E265ED11 Contactor
Allen Bradley 100-E265ED11 Contactor -
 Honeywell 51304511-100 Interface Module
Honeywell 51304511-100 Interface Module -
 SOLEXY BXF3S0101N0018 Gateway Module
SOLEXY BXF3S0101N0018 Gateway Module -
 OMRON CJ2H-CPU65 CPU Unit
OMRON CJ2H-CPU65 CPU Unit -
 Automation Direct GS2-45P0 AC Drive
Automation Direct GS2-45P0 AC Drive -
 M68-2000 2-Axis Motion CNC Controller
M68-2000 2-Axis Motion CNC Controller -
 OMRON CJ1M-CPU11 V3.0 PLC CPU Unit
OMRON CJ1M-CPU11 V3.0 PLC CPU Unit -
 OMRON CJ1W-NC413 4-Axis Positioning Controller
OMRON CJ1W-NC413 4-Axis Positioning Controller -
 OMRON 3G2A3-PRO16 Programming Console HMI
OMRON 3G2A3-PRO16 Programming Console HMI -
 Siemens 3VT8440-2AA04-2GA2 Molded Case Circuit Breaker
Siemens 3VT8440-2AA04-2GA2 Molded Case Circuit Breaker -
 Siemens 3RT5045 Contactor Series
Siemens 3RT5045 Contactor Series -
 OMRON C200HS-CPU01-E SYSMAC PLC Controller
OMRON C200HS-CPU01-E SYSMAC PLC Controller -
 OMRON C500-NC103-E Positioning Control Unit
OMRON C500-NC103-E Positioning Control Unit -
 OMRON CJ1W-TC001 Temperature Control Unit
OMRON CJ1W-TC001 Temperature Control Unit -
 OMRON NJ301-1100 NJ-PA3001 PLC System EtherCAT
OMRON NJ301-1100 NJ-PA3001 PLC System EtherCAT -
 Pilz 773100 M1P Safety Relay Base Unit
Pilz 773100 M1P Safety Relay Base Unit -
 Siemens SINUMERIK 840D SL NCU 720.3B with PLC 317-3 PN/DP
Siemens SINUMERIK 840D SL NCU 720.3B with PLC 317-3 PN/DP -
 Siemens 6AV6618-7GD01-3AB0 HMI Panel
Siemens 6AV6618-7GD01-3AB0 HMI Panel -
 OMRON F150-C15E-3 Vision Mate Controller PLC Overview
OMRON F150-C15E-3 Vision Mate Controller PLC Overview -
 Mitsubishi MELSEC A Series PLC System A63P A3ACPU A616AD A68RD3
Mitsubishi MELSEC A Series PLC System A63P A3ACPU A616AD A68RD3 -
 M68-2000 2 Axis Motion Controller SCE SERVO CNC
M68-2000 2 Axis Motion Controller SCE SERVO CNC -
 OMRON FZ-S2M PLC Camera Vision System
OMRON FZ-S2M PLC Camera Vision System -
 VISOLUX SLVA-4K PLC Module from Elektronik GmbH
VISOLUX SLVA-4K PLC Module from Elektronik GmbH -
 OMRON CJ1M-CPU23 V2.0 PLC CPU Unit
OMRON CJ1M-CPU23 V2.0 PLC CPU Unit -
 ABB AI86-16CHF PCB Card 5761751-9 B Specifications
ABB AI86-16CHF PCB Card 5761751-9 B Specifications -
 Allen-Bradley 100-D140ZJ22L Contactor Overview
Allen-Bradley 100-D140ZJ22L Contactor Overview -
 Merlin Gerin PB80 PLC Rack
Merlin Gerin PB80 PLC Rack -
 WEIR WE203 Power Supply PLC
WEIR WE203 Power Supply PLC -
 OMRON NX-TS3102 Temperature Input Unit
OMRON NX-TS3102 Temperature Input Unit -
 Siemens 6ES7146-6FF00-0AB0 I/O Module
Siemens 6ES7146-6FF00-0AB0 I/O Module -
 Fanuc A16B-3300-0057 Circuit Board
Fanuc A16B-3300-0057 Circuit Board -
 OMRON CJ1W-IDP01 Input Module
OMRON CJ1W-IDP01 Input Module -
 Siemens 6FX2007-1AD13 Handheld Unit
Siemens 6FX2007-1AD13 Handheld Unit -
 Gems EM54 PLC Module PCB
Gems EM54 PLC Module PCB -
 Beckhoff CX2030-0121 Embedded PC CPU
Beckhoff CX2030-0121 Embedded PC CPU -
 OMRON NJ301-1100 Machine Automation Controller
OMRON NJ301-1100 Machine Automation Controller -
 Biesse Rover CNI PLC 2153 030 7146.30 Numerical Control Module
Biesse Rover CNI PLC 2153 030 7146.30 Numerical Control Module -
 OMRON CJ1W DA08V Analog Output Module
OMRON CJ1W DA08V Analog Output Module -
 OMRON CS1D ETN21D Ethernet Module
OMRON CS1D ETN21D Ethernet Module -
 Allen Bradley 1768 L43 CompactLogix Controller
Allen Bradley 1768 L43 CompactLogix Controller -
 Schneider TWDLMDA40DTK Twido PLC Module
Schneider TWDLMDA40DTK Twido PLC Module -
 Mitsubishi NZ2EX2B 60AD4 Analog Input Module
Mitsubishi NZ2EX2B 60AD4 Analog Input Module -
 OMRON NS8 TV00B V2 Touch Display Panel
OMRON NS8 TV00B V2 Touch Display Panel -
 Mitsubishi AY71 CMOS TTL Output Module
Mitsubishi AY71 CMOS TTL Output Module -
 OMRON C500 CPU11 E Processor Module
OMRON C500 CPU11 E Processor Module -
 OMRON CJ1W PTS51 Temperature Input Module
OMRON CJ1W PTS51 Temperature Input Module -
 Siemens 6SL3100-1DE22-0AA1 600V DC Supply
Siemens 6SL3100-1DE22-0AA1 600V DC Supply -
 OMRON CJ1M-CPU23 PLC CPU 9‑Pin Serial
OMRON CJ1M-CPU23 PLC CPU 9‑Pin Serial -
 Schlumberger IMT4N 24‑250VAC 48‑230VAC PLC Timer
Schlumberger IMT4N 24‑250VAC 48‑230VAC PLC Timer -
 OMRON CJ1M-CPU22 PLC CPU Unit V2.0
OMRON CJ1M-CPU22 PLC CPU Unit V2.0 -
 Allen‑Bradley 2711P-B7C6D2 Touch Screen PanelView
Allen‑Bradley 2711P-B7C6D2 Touch Screen PanelView -
 ADSP-2181KST-160 Analog Devices DSP IC Specs
ADSP-2181KST-160 Analog Devices DSP IC Specs -
 Schneider LC1F400 400A Contactor Specifications
Schneider LC1F400 400A Contactor Specifications -
 Yaskawa SGDH-10DE-OY 1kW 400V Servo Drive
Yaskawa SGDH-10DE-OY 1kW 400V Servo Drive -
 Schneider TM262L10MESE8T M262 PLC 5ns Inst
Schneider TM262L10MESE8T M262 PLC 5ns Inst -
 Mitsubishi AA104VJ05 10.4in LCD Panel Specs
Mitsubishi AA104VJ05 10.4in LCD Panel Specs -
 Allen Bradley 1761-L32BWA MicroLogix 1000 PLC
Allen Bradley 1761-L32BWA MicroLogix 1000 PLC -
 Siemens 6ES7431-7KF00-0AB0 Analog Input Module
Siemens 6ES7431-7KF00-0AB0 Analog Input Module -
 Allen Bradley 1769-OB16 Output Module
Allen Bradley 1769-OB16 Output Module -
 Siemens 6ES7131-1BL12-0XB0 Input Module
Siemens 6ES7131-1BL12-0XB0 Input Module -
 Beckhoff EP7041-3002 EtherCAT Box Module
Beckhoff EP7041-3002 EtherCAT Box Module -
 Siemens RK7243-2AA30-0XB0 Communication Module
Siemens RK7243-2AA30-0XB0 Communication Module -
 Siemens 4AM5742-8DD40-0FA0 Transformer
Siemens 4AM5742-8DD40-0FA0 Transformer -
 Siemens 3TK2834-1BB40 Safety Relay
Siemens 3TK2834-1BB40 Safety Relay -
 Brother BAS 311 Sewing Machine Circuit Board
Brother BAS 311 Sewing Machine Circuit Board -
Yaskawa SGDH-10DE-OY Servo Driver
-
 OMRON C60H C6DR DE V1 Sysmac PLC
OMRON C60H C6DR DE V1 Sysmac PLC -
 MITSUBISHI ELECTRIC A2ACPU21 S1 CPU Module
MITSUBISHI ELECTRIC A2ACPU21 S1 CPU Module -
 ABB BAILEY INNPM12 Network Process Module
ABB BAILEY INNPM12 Network Process Module -
 HONEYWELL 620 0073C IPC PLC Module
HONEYWELL 620 0073C IPC PLC Module -
 Mitsubishi 15050 PR02B PLC Circuit Board
Mitsubishi 15050 PR02B PLC Circuit Board -
 SIEMENS 6SY7000 0AC37 Drive Control Module
SIEMENS 6SY7000 0AC37 Drive Control Module -
 OMRON TJ2 ECT16 Traxial EtherCAT Controller
OMRON TJ2 ECT16 Traxial EtherCAT Controller -
 GE Fanuc IC698PSD300D Power Supply Module
GE Fanuc IC698PSD300D Power Supply Module -
 Texas Instruments Series 505 16 Position Base
Texas Instruments Series 505 16 Position Base -
 OMRON YASKAWA SGDH 10DE OY Servo Drive
OMRON YASKAWA SGDH 10DE OY Servo Drive -
 Allen‑Bradley 440G-MT Safety Interlock Switch Specs
Allen‑Bradley 440G-MT Safety Interlock Switch Specs -
 Rubycon PD27A 24V 8A Power Supply Module
Rubycon PD27A 24V 8A Power Supply Module -
 SK-H1-GDB1-F11D PLC Gate Driver Board Kit
SK-H1-GDB1-F11D PLC Gate Driver Board Kit -
 VIPA 441-4UA14 451-4UA14 PLC Module Rack
VIPA 441-4UA14 451-4UA14 PLC Module Rack -
 Mitsubishi FX5U-80MT ESS PLC Controller Specs
Mitsubishi FX5U-80MT ESS PLC Controller Specs -
 Mitsubishi Q64TCRTN Temperature PLC Module
Mitsubishi Q64TCRTN Temperature PLC Module -
 GE 1C31170G Rev10 PLC Circuit Board Module
GE 1C31170G Rev10 PLC Circuit Board Module -
 Schneider TWDLMDA40DTK PLC Controller Module
Schneider TWDLMDA40DTK PLC Controller Module





