
Allen Bradley 1391-DES series digital AC servo drive
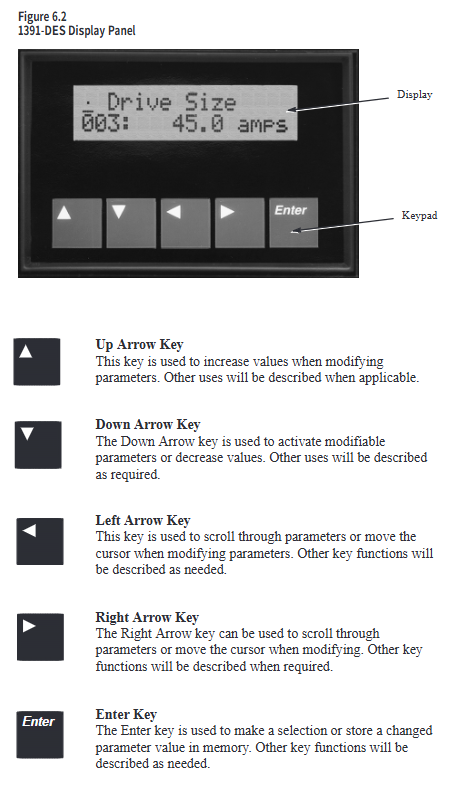
The parameters are divided into three levels: View level (only viewing the operating status, such as speed and current), Modify level (configuring system parameters, such as speed limit and current loop gain), and Maintenance level (advanced parameters, such as inertia compensation and friction compensation), which need to be unlocked through specific key combinations (such as simultaneously pressing the up/down/left arrow+Enter key for Maintenance level).
Core parameters: simulated speed gain (parameter 211, default 500rpm/V, can be calculated based on "maximum motor speed/maximum command voltage"), speed limit (parameters 144/145, default 10% higher than motor rated speed), current limit (parameters 156/157, default 300% motor rated current).
Start debugging process
Preliminary inspection: After confirming that the wiring is correct, power on to verify that the control voltage (± 12V DC,+5V DC) and bus voltage (300V DC) are normal and there are no fault alarms.
Guided start: When powered on for the first time, the driver automatically guides the motor model selection, rotation test (verify motor wiring, rotate clockwise/counterclockwise for 5 seconds each), and zero speed offset calibration (automatically eliminate command offset).
Auto Tune: Starting with parameter 190, the driver automatically measures the system inertia and friction coefficient, calculates the optimal speed loop gain (Kp/Ki), and is suitable for most scenarios; Manual tuning requires adjusting parameters 168 (proportional gain) and 169 (integral gain) to control the speed response overshoot within 20% -30%.
Troubleshooting and Maintenance
fault diagnosis
Fault indication: Front LED light (STATUS light flashing red=fault, green constant light=normal; ENABLE light on=driver enabled), LCD displays specific fault codes (such as "amp overttemp"=driver overheating, "resolver loss"=rotary transformer fault).
Common troubleshooting:
Overvoltage fault: Check whether the input voltage and shunt resistor are open circuited/selected incorrectly, and whether the load inertia is too large;
Rotating transformer fault: Check if the resolver wiring is loose/reversed, and if the cable length exceeds 600 feet;
Overcurrent fault: Check if the motor is short circuited, if the current limit parameter is set too low, and if the load is stuck.
Maintenance points
Regular inspection: clean the cooling fan, confirm that the wiring terminals are not loose, and that the braking resistor has no signs of overheating;
Component replacement: The fuse should be replaced according to the manual model (such as Bussmann KLM10 10A/500V for DES15), avoiding using alternative models; When replacing the control board, pay attention to ESD protection (wear an anti-static wristband).
Supporting equipment and accessories
Adaptation components
Motor: 1326AB series AC servo motor (including Torque Plus series), which needs to be matched with driver current (such as DES22 compatible with 1326AB-B3E motor);
Transformer: 1391 isolation transformer (output 230V AC 3-phase+36V AC 1-phase, such as 1391-T050DT 5kVA model), to ensure UL certification validity;
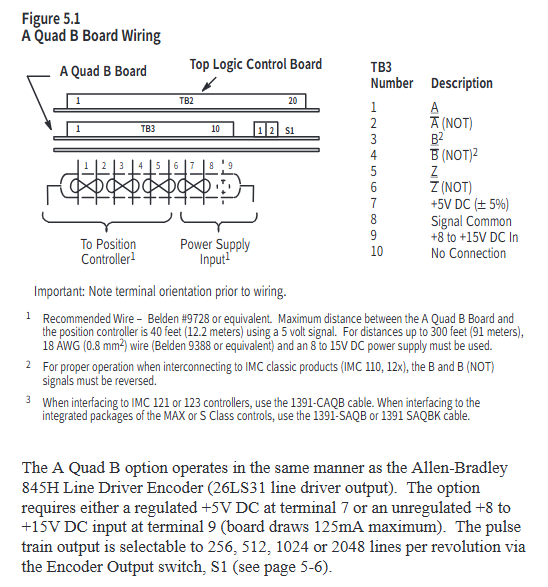
Cable: 1326 CFUxx (resolver line), 1326 CPABxx (motor power line), 1391-CAQB (AQB encoder line) and other specialized shielded cables.
attachment options
Brake power rectifier (1326-MOD-BPS): provides 115V AC input rectification for 90V DC brake;
Planetary gearbox (1326AB-PG series): compatible with different reduction ratios (3:1-100:1), low backlash option (LB) suitable for high-precision scenarios;
Linear Acceleration and Deceleration Module (CR-APG-001): Manually set trapezoidal speed curve, supporting 4 preset speeds.
- OMRON
- ABB
- General Electric
- EMERSON
- Honeywell
- HIMA
- ALSTOM
- Rolls-Royce
- MOTOROLA
- Rockwell
- Siemens
- Woodward
- YOKOGAWA
- FOXBORO
- KOLLMORGEN
- MOOG
- KB
- YAMAHA
- BENDER
- TEKTRONIX
- Westinghouse
- AMAT
- AB
- XYCOM
- Yaskawa
- B&R
- Schneider
- KONGSBERG
- NI
- WATLOW
- ProSoft
- SEW
- ADVANCED
- Reliance
- TRICONEX
- METSO
- MAN
- Advantest
- STUDER
- DANAHER MOTION
- Bently
- Galil
- EATON
- MOLEX
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- Beijer
- Moxa
- Rexroth
- Johnson
- WAGO
- TOSHIBA
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- Application field
- XP POWER
- CTI
- TRICON
- STOBER
- Thinklogical
- Horner Automation
- Meggitt
- Fanuc
- Baldor
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- Iba
- Beckhoff
-
 Basler DECS-200-2L Digital Excitation Control
Basler DECS-200-2L Digital Excitation Control -
 Basler BE1-47N Voltage Phase Sequence Relay
Basler BE1-47N Voltage Phase Sequence Relay -
 Basler AEC63-7 Analog Excitation Controller 220-277V
Basler AEC63-7 Analog Excitation Controller 220-277V -
 Basler BE1-50/51B-107 Overcurrent Relay
Basler BE1-50/51B-107 Overcurrent Relay -
 Basler Electric BE1‑32R BE1‑E1P‑BON0F Protective Relay
Basler Electric BE1‑32R BE1‑E1P‑BON0F Protective Relay -
 Basler BE1-25 Solid State Time Overcurrent Relay M1EA6PA5S1F
Basler BE1-25 Solid State Time Overcurrent Relay M1EA6PA5S1F -
 Basler MVC 232 Manual Voltage Control Module 90 37000 103 60VAC 55VDC
Basler MVC 232 Manual Voltage Control Module 90 37000 103 60VAC 55VDC -
 Basler RAL6144-16GM Racer GigE Line Scan Camera
Basler RAL6144-16GM Racer GigE Line Scan Camera -
 Basler SSR 63-12 Static Voltage Regulator
Basler SSR 63-12 Static Voltage Regulator -
 Basler BE1-51A Overcurrent Relay
Basler BE1-51A Overcurrent Relay -
 Basler BE1-87T Solid State Protective Relay
Basler BE1-87T Solid State Protective Relay -
 Basler SR4A2B01B3A Static Voltage Regulator
Basler SR4A2B01B3A Static Voltage Regulator -
 Basler SSR 32-12 Static Voltage Regulator
Basler SSR 32-12 Static Voltage Regulator -
 Basler TRR00696 Transformer 1KVA 115V
Basler TRR00696 Transformer 1KVA 115V -
 Basler DECS-100-B15 AVR Replacement
Basler DECS-100-B15 AVR Replacement -
Basler BE1-27 Under-Voltage Relay
-
 Basler ACA2000-50GM Interface Module
Basler ACA2000-50GM Interface Module -
 Basler AEC63-7 Analog Excitation Controller
Basler AEC63-7 Analog Excitation Controller -
 Basler PRS 250 Veri-Sync Relay
Basler PRS 250 Veri-Sync Relay -
 Basler SR4A-2B15B3A Static Voltage Regulator
Basler SR4A-2B15B3A Static Voltage Regulator -
Basler BE1-32R Power Relay
-
Basler SR8A-2B06B3E Static Voltage Regulator
-
Basler BE1-81 O/U Frequency Relay
-
 Basler BE1-51A-K2E-W6M-B1N0F Overcurrent Relay
Basler BE1-51A-K2E-W6M-B1N0F Overcurrent Relay -
Basler BE1-851 Overcurrent Relay G3A1S1 – 48-125V AC/DC
-
 Basler BEI-51 Overcurrent Relay – NSN 5945-01-293-2363
Basler BEI-51 Overcurrent Relay – NSN 5945-01-293-2363 -
Basler Electric L301KC Protective Relay – L301KC
-
 Basler DECS-100-B15 Automatic Voltage Regulator – Generator AVR
Basler DECS-100-B15 Automatic Voltage Regulator – Generator AVR -
 Basler SR4A-2B15B3A Static Voltage Regulator – SR4A2B15B3A
Basler SR4A-2B15B3A Static Voltage Regulator – SR4A2B15B3A -
 Basler UF 312 Under Frequency Protective Module – 9094700100
Basler UF 312 Under Frequency Protective Module – 9094700100 -
Basler Electric MVC 232 Manual Control Module – 60VAC 55VDC 20A
-
Basler PRS 250 Veri-Sync Relay – Generator Synchronizing Relay
-
 Basler DECS-100-A05 Digital Regulator Review
Basler DECS-100-A05 Digital Regulator Review -
 Basler AEM-2020 Analog Expansion Module Specs
Basler AEM-2020 Analog Expansion Module Specs -
 Basler DECS-100-B15 Digital Excitation Specs
Basler DECS-100-B15 Digital Excitation Specs -
Basler Electric 9125600106 Regulator Component
-
Basler BE1-51A-K1E-W6M-B1N0F Overcurrent Relay
-
 Basler MVC-301 MVC 300 Excitation Controller
Basler MVC-301 MVC 300 Excitation Controller -
 Basler SSR 32-12 Static Voltage Regulator
Basler SSR 32-12 Static Voltage Regulator -
 Basler 9-2849-00-101 Control Module
Basler 9-2849-00-101 Control Module -
Basler BE1-51A Overcurrent Relay
-
 Basler BE1-51/27R Overcurrent Relay
Basler BE1-51/27R Overcurrent Relay -
 Basler BE1-51 Overcurrent Relay
Basler BE1-51 Overcurrent Relay -
 Basler SR8A-2B15B3A Static Voltage Regulator
Basler SR8A-2B15B3A Static Voltage Regulator -
 Basler BE32965001 Transformer and Timer Board
Basler BE32965001 Transformer and Timer Board -
 Basler 9174700100 EL200-7 Excitation Limiter
Basler 9174700100 EL200-7 Excitation Limiter -
 Basler BE2000E AVR Voltage Regulator
Basler BE2000E AVR Voltage Regulator -
Basler BE1-87G Differential Relay
-
 Basler BE21834001 Generator Control Module
Basler BE21834001 Generator Control Module -
Basler DECS-100-B15 AVR
-
 Basler D90 96801 100 PCB Card
Basler D90 96801 100 PCB Card -
 Basler XR2002F Voltage Regulator (110 VAC, 48-480 Hz)
Basler XR2002F Voltage Regulator (110 VAC, 48-480 Hz) -
 Basler SR8A-2B14B3A Regulator
Basler SR8A-2B14B3A Regulator -
 Basler 9561500100 Module
Basler 9561500100 Module -
 Basler DECS-400 BE1-11 System
Basler DECS-400 BE1-11 System -
 Basler DECS-100-B15 Excitation Control
Basler DECS-100-B15 Excitation Control -
 Basler SCP 210 Frequency Controller
Basler SCP 210 Frequency Controller -
Basler SR4A-2B15B3A Static Voltage Regulator
-
Basler BE1-32R Power Relay
-
 Basler PIA2400-17GM Power Interface Adapter
Basler PIA2400-17GM Power Interface Adapter -
 Basler MVC 232 Manual Voltage Control Module
Basler MVC 232 Manual Voltage Control Module -
 Basler SSR 32-12 Static Voltage Regulator
Basler SSR 32-12 Static Voltage Regulator -
Basler 5MW AVR Generator Voltage Regulator
-
 Basler VR63-4B Voltage Regulator
Basler VR63-4B Voltage Regulator -
Basler DECS-100-A05 AVR for Engine Generator
-
Basler DECS-100-B15 Automatic Voltage Regulator
-
Basler BE1-32R Directional Power Relay
-
Basler BE1-87B Differential Relay
-
 Basler UFOV 260A Protective Module
Basler UFOV 260A Protective Module -
 Basler 9-2614-02-100 PCB Rev M
Basler 9-2614-02-100 PCB Rev M -
Basler DECS-100-B15 Digital AVR
-
 Basler 9284900103 PS DECS-400N
Basler 9284900103 PS DECS-400N -
 Basler D4N3H1U Intertie Protection
Basler D4N3H1U Intertie Protection -
 Basler DECS-100-B15 A15 AVR
Basler DECS-100-B15 A15 AVR -
 Basler KR4F Voltage Regulator
Basler KR4F Voltage Regulator -
 Basler BE26434 T14 Transformer
Basler BE26434 T14 Transformer -
 Basler SR8A-2B15B3A Regulator
Basler SR8A-2B15B3A Regulator -
 Westinghouse 774B472A12 AR Relay
Westinghouse 774B472A12 AR Relay -
Basler DECS-100-B15 AVR
-
Basler XR2002F Regulator 110V
-
Basler SR125-E Static Regulator
-
Basler SSR 125-12 Regulator
-
Basler MOC2599 Motor Pot
-
 Basler BE1-DFPR Feeder Relay
Basler BE1-DFPR Feeder Relay -
 Basler CBS 305 Current Boost
Basler CBS 305 Current Boost -
Basler BE1-25 AutoSync
-
Basler MVC 300 Voltage Control
-
 Basler BE3-25A AutoSync
Basler BE3-25A AutoSync -
 Basler KR7FF Static Regulator
Basler KR7FF Static Regulator -
Basler 90-49000-100 Regulator
-
 Basler 880 kVA Dry Type Transformer Specs
Basler 880 kVA Dry Type Transformer Specs -
Basler Electric BE1-25 Sync-Check Relay Specs
-
 Basler SSR 125-12 Voltage Regulator Specs
Basler SSR 125-12 Voltage Regulator Specs -
 Basler Electric BE1-851 Overcurrent Relay Review
Basler Electric BE1-851 Overcurrent Relay Review -
Basler Electric 149D930G02 Control Sub-Assembly
-
 Basler Electric BE1-81O/UT Frequency Relay Specs
Basler Electric BE1-81O/UT Frequency Relay Specs -
 Basler Electric BE1-51/27C Overcurrent Relay
Basler Electric BE1-51/27C Overcurrent Relay -
 Basler Electric 149D956G02 Industrial Component
Basler Electric 149D956G02 Industrial Component -
Basler Electric BE1-51A Overcurrent Relay Specs
-
 Basler Electric BE1-40Q Loss of Excitation Relay
Basler Electric BE1-40Q Loss of Excitation Relay -
Basler DECS-200 Excitation Control System
-
 Basler DECS-200 Voltage Regulator 56-277V AC / 125V DC
Basler DECS-200 Voltage Regulator 56-277V AC / 125V DC -
Basler BE1-87T Transformer Differential Relay
-
 Basler RDP-110-S1 Protection Relay
Basler RDP-110-S1 Protection Relay -
 Basler BE1-700V Digital Protective Relay
Basler BE1-700V Digital Protective Relay -
 Basler BE1-951 Overcurrent Protection System
Basler BE1-951 Overcurrent Protection System -
 Basler DECS-300 Digital Excitation Control
Basler DECS-300 Digital Excitation Control -
 Basler DECS-200 Digital Excitation Control
Basler DECS-200 Digital Excitation Control -
 Basler DECS-200-1C Excitation Control System
Basler DECS-200-1C Excitation Control System -
Basler DECS-200-1L Digital Excitation Control
-
 Basler Electric BE1-GPS Generator Protection System
Basler Electric BE1-GPS Generator Protection System -
Basler Electric DECS-200-1C Digital Excitation Controller
-
 Basler Electric DECS125-15 Excitation Control with Power Module
Basler Electric DECS125-15 Excitation Control with Power Module -
Basler Electric BE1-87G Differential Relay
-
 Basler Electric BE1-11 Protection System I5A3M2P2N0EA00
Basler Electric BE1-11 Protection System I5A3M2P2N0EA00 -
Basler Electric DECS-200-1C Excitation Control System
-
Basler Electric BE1-11g Generator Protection Relay
-
Basler Electric DECS 125-15-B2C1 V2.0.9 Excitation Control
-
Basler Electric BE1-81O/UT3ED1JA7N2F Frequency Relay
-
Basler Electric BE1-81O/UT3EE1YB7N1F Frequency Relay
-
 Basler Electric DECS-200-1L Digital Excitation Control System
Basler Electric DECS-200-1L Digital Excitation Control System -
Basler DECS125-15-B2C1 Excitation Control
-
 Basler 9507900205 SSR Retrofit Voltage Regulator
Basler 9507900205 SSR Retrofit Voltage Regulator -
 Basler BE2000E Digital Voltage Regulator
Basler BE2000E Digital Voltage Regulator -
 Basler BE1-GPS Generator Protection System
Basler BE1-GPS Generator Protection System -
Basler DECS-250-CN1CN1N Digital Excitation Control
-
 Basler DGC-2020 Genset Controller
Basler DGC-2020 Genset Controller -
Basler BE1-81O UT3ED1LA7N0F Frequency Relay (Variant)





