
Yokogawa AQ6377E Optical Spectrum Analyzer Remote Control
Yokogawa AQ6377E Optical Spectrum Analyzer Remote Control
Function positioning
Focus on the remote control function of AQ6377E, provide detailed instructions on the configuration methods of GP-IB interface and Ethernet interface, as well as the use of communication instructions, and support the setting of measurement parameters, data acquisition, and automated analysis of equipment through external controllers (such as PCs).
Remote control core functions and interface configuration
(1) Remote control basic functions
Control mode switching:
Local → Remote: The controller sends a listening address containing REN (Remote Enable) and ATN set to "True". The device enters remote mode, the REMOTE indicator light is on, and only the LOCAL key is available; If receiving LLO (local lock) messages, the LOCAL key is also disabled, and the controller needs to set REN to "False" to unlock.
Remote → Local: Press the device LOCAL button (non local lock state), or the controller sends a GTL (return to local) message, the device returns to local mode, the REMOTE indicator light goes out, and all buttons are restored to available.
Command sending and receiving mechanism:
Buffer: Input buffer (4 MB, discard excess data), output buffer (4 MB, overwrite old data with new data), error buffer (only stores the latest error information).
Message terminator: Program messages support EOI signals, LF characters LF+EOI; The response message is fixed as LF+EOI; Binary waveform transmission only supports EOI.
Timeout setting: It is recommended to set the controller timeout to 30 seconds or more, as the device automatically adjusts the offset every 10 minutes (taking about 30 seconds) to avoid communication interruption; If you need to shorten the timeout, you can manually turn off the automatic offset (instruction: CALibration: ZERO off) and manually execute the offset during the measurement gap (instruction: CALibration: ZERO once).
(2) GP-IB interface configuration and specifications
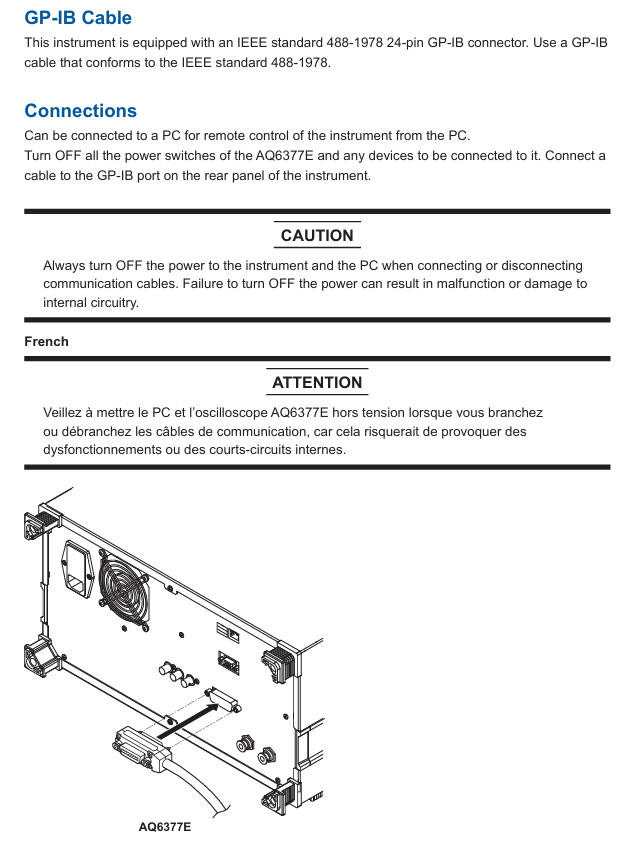
Hardware connection:
Use a 24 pin GP-IB cable that complies with the IEEE 488-1978 standard. Before connecting, turn off the power to the device and controller to avoid circuit damage;
The screws of the cable connector need to be tightened. A single bus can connect up to 15 devices (including controllers), with a total length of no more than 20 meters. It supports Daisy chain or star topology and circular connections are prohibited.
Function and specifications:
Function: Supports listening (receiving controller commands) and dialogue (outputting data to the controller), but does not support listening only, dialogue only, or controller functions;
Electrical specifications: comply with IEEE 488-1978 (electromechanical) and IEEE 488.2-1992 (protocol), address range 0-30, encoded as ASCII;
Interface message response: Supports IFC (interface clearing), REN (remote enable), GTL (return to local), SDC (selected device clearing), etc., does not support IDY (recognition), PPC (parallel polling configuration).
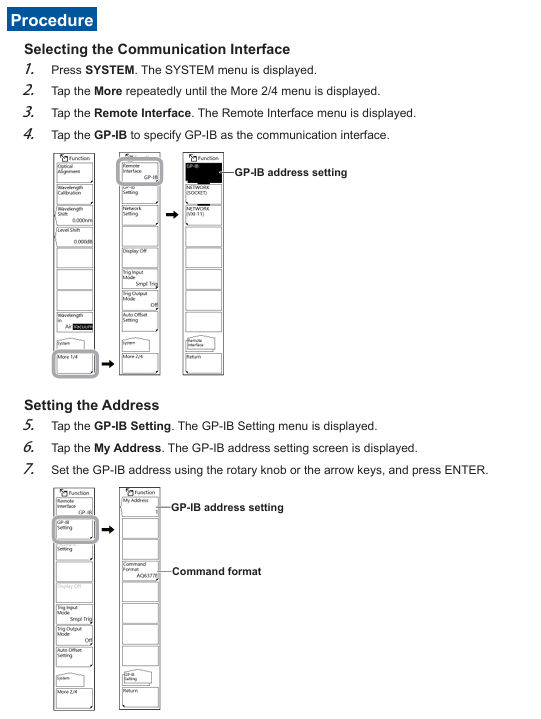
Address and instruction format settings:
Enter SYSTEM → More 2/4 → Remote Interface → GP-IB, and in GP-IB Setting → My Address, use the knob or directional keys to set the address (0-30), ensuring that the device address in the bus is unique;
The instruction format supports AQ6377E native mode (default) or AQ6317 compatible mode, which can be set through Command Format. The compatibility mode should refer to the AQ6317 instruction mapping table in the appendix.
(3) Ethernet interface configuration and specifications
Hardware connection:
Use UTP (unshielded twisted pair) or STP (shielded twisted pair) cables to connect to the local area network through the RJ45 interface of the device's rear panel;
Connecting to a PC requires the use of a hub with a direct cable, and the performance of cross cable direct connection cannot be guaranteed; The cable needs to match the network speed (10/100/1000 Mbps).
Function and specifications:
|Parameters | Specifications|
|Communication port | 1|
|Standard compatibility | IEEE 802.3|
|Transmission method | Ethernet (10BASE-T/100BASE-TX/1000BASE-T)|
|Transmission rate | 10/100/1000 Mbps (adaptive)|
|Communication Protocol | TCP/IP|
|Default port number | 10001/tcp (Socket communication)|
|Remote monitoring port | 20001/tcp (fixed, requires dedicated software)|
Network configuration steps:
Go to SYSTEM → More 2/4 → Remote Interface, select WORK (SOCKET) or WORK (VXI-11) as the communication interface;
Go to Network Setting → TCP/IP Setting, configure IPv4/IPv6:
IPv4: Select AUTO (DHCP) to automatically obtain the address, or manually set the IP address, subnet mask, and default gateway using MANUAL;
IPv6: Select AUTO for automatic configuration, or manually set IP address, subnet prefix length, and default gateway using MANUAL;
(Socket communication specific) Set remote port number (default 10001), user account (default anonymous, password optional), timeout period (0-21600 seconds, 0 is infinite timeout);
(Optional) Enable remote monitoring (Remote Monitor → Monitor Port=On), supports PC remote viewing of device screens, requires dedicated software.
Authentication and Instruction Format:
Socket communication requires authentication through the OPEN command, for example: OPEN "username", supports plaintext or MD5 encryption authentication. After successful authentication, the device returns "READY" and lights up the REMOTE light;
The instruction format is consistent with GP-IB and supports AQ6377E native mode or AQ6317 compatible mode. To disconnect, the CLOSE instruction must be sent.
Programming specifications and instruction explanations
(1) Basic rules of programming
Instruction syntax:
Long Short Format: Supports both short format (uppercase part) and long format, such as: Initiatiate, which can be abbreviated as: Initiate;
Case insensitive: The device does not distinguish between uppercase and lowercase when receiving instructions, and the return value is uniformly capitalized;
Parameter Separation: Instructions and parameters should be separated by spaces, and multiple parameters should be separated by commas (spaces can be added before and after commas to improve readability);
Numerical representation: Supports multiple unit suffixes (such as nm, μ m, GHz), automatically converted to basic units during transmission (such as+1.550000E-006 m for 1550 nm transmission), and automatically rounded off when accuracy exceeds the device's processing range.
Instruction type:
Sequential instruction: The next instruction can only be executed after completion, such as CALCulate: DATA? (Query and analysis results);
Overlapable instructions: During execution, other instructions can be executed in parallel, such as Initiatate;
Overlapping instructions: can only run during the execution of overlapping instructions, such as ABORt (stop measurement), * STB? (Read status byte).
Multi instruction transmission: Multiple instructions can be separated by semicolons in a single output statement and executed in order, such as SENSe: WAVelengath: STARt 1500NM; :STOP 1600NM。
(2) Detailed explanation of core instruction grouping
The manual divides instructions into 16 core groups, covering scenarios such as measurement control, data processing, system configuration, etc. The key groups are as follows:
ABORt Group:
Core instruction: ABORt: Stop measurement, calibration and other operations (such as scanning initiated by Initiatate and calibration initiated by CALibration), which belongs to overlapping instructions.
CALCulate Group:
Function: Implement spectral analysis (such as THREE/ENVELOPE/RMS spectral width analysis), peak/valley search, marker control, trace calculation (such as mathematical operations of Trace C/F/G);
Example of Key Instructions:
CALCulate: CATegg SWTHresh: Choose the THRESH method for spectrum width analysis;
CALCulate: MARKer: MAXimum: Search for peaks on the activity trace and place moving markers;
:CALCulate:DATA? Query the latest analysis results (requires first executing CALCulate [: IMMediate] to start the analysis).
SENSe Group:
Function: Configure measurement parameters such as wavelength range, resolution bandwidth, sensitivity, scanning speed;
Example of Key Instructions:
SENSe: WAVelocity: CENTer 1550NM: Set the measurement center wavelength to 1550 nm;
SENSe: BANDWidth: RESolution 0.1NM: Set the resolution bandwidth to 0.1 nm;
SENSe MID: Set the measurement sensitivity to MID mode.
MMEMory Group:
Function: Manage file operations, such as saving/loading trace data, setting files, and graphic files;
Example of Key Instructions:
MMEMory: STORe: TRACe TRA, CSV, "test. csv", INTernal: Save Trace A data in CSV format to an internally stored test. csv file;
MMEMory: LOAD: SETTing "setting. stc", EXTernal: Load the setting file "setting. stc" from external storage (such as USB).
Common Commands Group:
Compliant with IEEE 488.2 standard, the key instructions are as follows:
|Instructions | Functions | Examples|
|*CLS | Clear all event status registers | * CLS|
|*IDN? |Query device identification (manufacturer, model, serial number, firmware version) | * IDN? → YOKOGAWA,AQ6377E,123456789,1.00|
|*OPC | OPC bit of standard event status register after operation completion | * OPC|
|*RST | Device reset, restore default state (except GP-IB address and calibration data) | * RST|
|*TRG | Perform a single scan (ignore current scan mode) | * TRG|
|*WAI | Wait for the current instruction to complete before executing the next one |: Initialize; *WAI; :CALCulate:DATA? |
(3) Status Register
The device complies with IEEE 488.2 and SCPI standards, and includes four types of status registers for monitoring the device's operating status:
Status Byte Register (STB):
An 8-bit register that contains a summary of the overall device status, such as OPS (Operational Status Summary, bit7), ESB (Standard Event Summary, bit5), MAV (Output Buffer with Data), bit4);
Reading method: * STB? (Query current value, do not clear) or serial polling (clear RQS bit after reading).
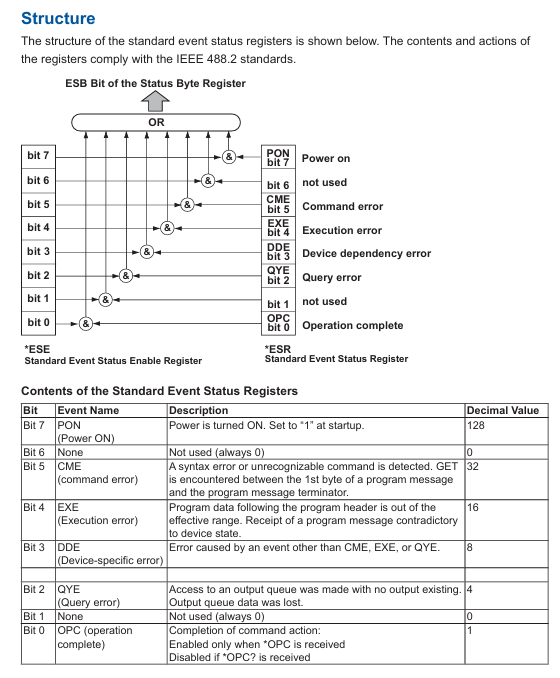
Standard Event Status Register (ESR):
8-bit register, records device events such as PON (power on, bit7), CME (instruction error, bit5), OPC (operation completed, bit0);
Reading method: * ESR? (Clear the register after querying);
Enable control: By setting the enable register through * ESE, only the event corresponding to the enable bit will trigger the ESB digest.
Operation status register:
Contains operation condition registers (real-time status, such as scanning and calibration), operation event registers (latch events, such as scan completion), and operation enable registers (controlling which events trigger OPS digest);
Reading method: STATus: OPERation: CONDition? (Conditional register),: STATus: OPERation: EVENT? (Event register, cleared after querying).
Suspicious Status Register:
The function has not been allocated yet, all bits are fixed to 0, and the reading method is similar to the operation status register.
Program functionality and automated measurement
(1) Program Editing and Execution
Program registration and editing:
Go to APP → Program → Execute, select the program number (such as 01-99), and set the program name (up to 56 characters);
Supports inserting/deleting/copying rows, editing parameters, and can select functional commands (such as scanning, analyzing) or special commands (such as looping, conditional judgment) through Command Select.
Program execution:
Select the target program, click Execute to start, and during execution, the output data can be viewed through the Output Window;
Supports pause (PAUSE instruction), data input (DATA INPUT instruction, receiving user input values), and data output (DATA OUTPUT instruction, outputting variables or strings to the window).
Program saving and loading:
Save: The program can be saved as PGC format file (approximately 13 KB), stored in internal memory or USB, supports automatic naming (by serial number or date);
Loading: Loading programs from storage media, supporting overwriting or merging existing programs.
(2) Program Control Instructions and Variables
Variable type:
General variables: such as E, G-K, O-V, X-Z (numerical), A-D (string)
Tag variables: such as WM (moving marker wavelength), L1 (fixed marker 1 level), W2-W1 (marker 1-2 wavelength difference);
Analyze variables such as SPWD (spectral width), MEANWL (center wavelength), WDMCHN (number of channels detected by WDM analysis).
Program control instructions:
Loop control: such as N=10; N=N-1; IF N<>0 GOTO 10 (10 cycles);
Conditional judgment: If IF F1<=SPWD<=F2 GOTO 20 (if the spectral width is within the range of F1-F2, skip to line 20);
External control: such as SEND LAN A $, 10001, "* IDN?" (sending instructions to external devices specified by variable A through LAN)
, 10001, "*IDN?"; B (Receive external device responses and store them).
(3) Example Program
The manual provides two typical examples, covering remote measurement and data storage scenarios:
Example 1: Parameter Setting and Spectral Analysis:
Function: Set measurement parameters (center wavelength 1550 nm, span 10 nm, sensitivity MID), perform a single scan, perform frequency spectrum width analysis using the THREE method, and output the results to the PC;
Key steps: Connect the device through the PyVISA library (supporting GP-IB/Socket/VXI-11), send the SENSe command to configure parameters, initiate scanning, perform analysis using CALCulate, and wait for WAI to complete before reading the results.
Example 2: Screenshot saving:
Function: Save the device screen as a PNG format file and load it to the PC via file transfer command (path C: test. png);
Key steps: Send: MMEMory: STORe: GRAPhics Save screenshot to internal storage,: MMEMory: DATA? Read binary data from the file and write it to a local file on the PC.
Appendix and Compatibility
(1) Key Appendix Content
Correspondence table between soft keys and remote commands:
List the remote commands corresponding to all panel soft keys of the device, such as the Peak Search soft key corresponding to CALCulate: MARK: MAX imum.
AQ6317 compatible instruction table:
Provide instruction mapping between AQ6377E and the old model AQ6317, such as the CWL of AQ6317 corresponding to the SENSe: WAVelocity: CENTer of AQ6377E.
Output format of analysis results:
Provide a detailed explanation of the output structure of various analyses (such as WDM, EDFA-NF), including data order, units, and accuracy.
(2) Compatibility and Precautions
Model compatibility:
Support compatibility with commands and programs of old models such as AQ6317 and AQ6370D, with some commands requiring parameter format adjustment (refer to Appendix 6-7).
Operation taboos:
Prohibit disconnecting communication connections during program execution to avoid data loss;
During remote control, it is prohibited to use both GP-IB and Ethernet interfaces simultaneously;
When saving/loading files, ensure that the storage medium (such as USB) is properly mounted to avoid file damage.
- OMRON
- ABB
- General Electric
- EMERSON
- Honeywell
- HIMA
- ALSTOM
- Rolls-Royce
- MOTOROLA
- Rockwell
- Siemens
- Woodward
- YOKOGAWA
- FOXBORO
- KOLLMORGEN
- MOOG
- KB
- YAMAHA
- BENDER
- TEKTRONIX
- Westinghouse
- AMAT
- AB
- XYCOM
- Yaskawa
- B&R
- Schneider
- KONGSBERG
- NI
- WATLOW
- ProSoft
- SEW
- ADVANCED
- Reliance
- TRICONEX
- METSO
- MAN
- Advantest
- STUDER
- DANAHER MOTION
- Bently
- Galil
- EATON
- MOLEX
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- Beijer
- Moxa
- Rexroth
- Johnson
- WAGO
- TOSHIBA
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- Application field
- XP POWER
- CTI
- TRICON
- STOBER
- Thinklogical
- Horner Automation
- Meggitt
- Fanuc
- Baldor
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- Iba
- Beckhoff
-
 Basler D90 96801 100 PCB Card
Basler D90 96801 100 PCB Card -
 Basler XR2002F Voltage Regulator (110 VAC, 48-480 Hz)
Basler XR2002F Voltage Regulator (110 VAC, 48-480 Hz) -
 Basler SR8A-2B14B3A Regulator
Basler SR8A-2B14B3A Regulator -
 Basler 9561500100 Module
Basler 9561500100 Module -
 Basler DECS-400 BE1-11 System
Basler DECS-400 BE1-11 System -
 Basler DECS-100-B15 Excitation Control
Basler DECS-100-B15 Excitation Control -
 Basler SCP 210 Frequency Controller
Basler SCP 210 Frequency Controller -
 Basler SR4A-2B15B3A Static Voltage Regulator
Basler SR4A-2B15B3A Static Voltage Regulator -
 Basler BE1-32R Power Relay
Basler BE1-32R Power Relay -
 Basler PIA2400-17GM Power Interface Adapter
Basler PIA2400-17GM Power Interface Adapter -
 Basler MVC 232 Manual Voltage Control Module
Basler MVC 232 Manual Voltage Control Module -
 Basler SSR 32-12 Static Voltage Regulator
Basler SSR 32-12 Static Voltage Regulator -
 Basler 5MW AVR Generator Voltage Regulator
Basler 5MW AVR Generator Voltage Regulator -
 Basler VR63-4B Voltage Regulator
Basler VR63-4B Voltage Regulator -
 Basler DECS-100-A05 AVR for Engine Generator
Basler DECS-100-A05 AVR for Engine Generator -
 Basler DECS-100-B15 Automatic Voltage Regulator
Basler DECS-100-B15 Automatic Voltage Regulator -
 Basler BE1-32R Directional Power Relay
Basler BE1-32R Directional Power Relay -
 Basler BE1-87B Differential Relay
Basler BE1-87B Differential Relay -
 Basler UFOV 260A Protective Module
Basler UFOV 260A Protective Module -
 Basler 9-2614-02-100 PCB Rev M
Basler 9-2614-02-100 PCB Rev M -
Basler DECS-100-B15 Digital AVR
-
 Basler 9284900103 PS DECS-400N
Basler 9284900103 PS DECS-400N -
 Basler D4N3H1U Intertie Protection
Basler D4N3H1U Intertie Protection -
 Basler DECS-100-B15 A15 AVR
Basler DECS-100-B15 A15 AVR -
 Basler KR4F Voltage Regulator
Basler KR4F Voltage Regulator -
 Basler BE26434 T14 Transformer
Basler BE26434 T14 Transformer -
 Basler SR8A-2B15B3A Regulator
Basler SR8A-2B15B3A Regulator -
 Westinghouse 774B472A12 AR Relay
Westinghouse 774B472A12 AR Relay -
Basler DECS-100-B15 AVR
-
Basler XR2002F Regulator 110V
-
Basler SR125-E Static Regulator
-
 Basler SSR 125-12 Regulator
Basler SSR 125-12 Regulator -
 Basler MOC2599 Motor Pot
Basler MOC2599 Motor Pot -
 Basler BE1-DFPR Feeder Relay
Basler BE1-DFPR Feeder Relay -
 Basler CBS 305 Current Boost
Basler CBS 305 Current Boost -
 Basler BE1-25 AutoSync
Basler BE1-25 AutoSync -
 Basler MVC 300 Voltage Control
Basler MVC 300 Voltage Control -
 Basler BE3-25A AutoSync
Basler BE3-25A AutoSync -
 Basler KR7FF Static Regulator
Basler KR7FF Static Regulator -
 Basler 90-49000-100 Regulator
Basler 90-49000-100 Regulator -
 Basler 880 kVA Dry Type Transformer Specs
Basler 880 kVA Dry Type Transformer Specs -
 Basler Electric BE1-25 Sync-Check Relay Specs
Basler Electric BE1-25 Sync-Check Relay Specs -
 Basler SSR 125-12 Voltage Regulator Specs
Basler SSR 125-12 Voltage Regulator Specs -
 Basler Electric BE1-851 Overcurrent Relay Review
Basler Electric BE1-851 Overcurrent Relay Review -
Basler Electric 149D930G02 Control Sub-Assembly
-
 Basler Electric BE1-81O/UT Frequency Relay Specs
Basler Electric BE1-81O/UT Frequency Relay Specs -
 Basler Electric BE1-51/27C Overcurrent Relay
Basler Electric BE1-51/27C Overcurrent Relay -
 Basler Electric 149D956G02 Industrial Component
Basler Electric 149D956G02 Industrial Component -
Basler Electric BE1-51A Overcurrent Relay Specs
-
 Basler Electric BE1-40Q Loss of Excitation Relay
Basler Electric BE1-40Q Loss of Excitation Relay -
 Basler DECS-200 Excitation Control System
Basler DECS-200 Excitation Control System -
 Basler DECS-200 Voltage Regulator 56-277V AC / 125V DC
Basler DECS-200 Voltage Regulator 56-277V AC / 125V DC -
Basler BE1-87T Transformer Differential Relay
-
 Basler RDP-110-S1 Protection Relay
Basler RDP-110-S1 Protection Relay -
 Basler BE1-700V Digital Protective Relay
Basler BE1-700V Digital Protective Relay -
 Basler BE1-951 Overcurrent Protection System
Basler BE1-951 Overcurrent Protection System -
 Basler DECS-300 Digital Excitation Control
Basler DECS-300 Digital Excitation Control -
 Basler DECS-200 Digital Excitation Control
Basler DECS-200 Digital Excitation Control -
 Basler DECS-200-1C Excitation Control System
Basler DECS-200-1C Excitation Control System -
Basler DECS-200-1L Digital Excitation Control
-
 Basler Electric BE1-GPS Generator Protection System
Basler Electric BE1-GPS Generator Protection System -
Basler Electric DECS-200-1C Digital Excitation Controller
-
 Basler Electric DECS125-15 Excitation Control with Power Module
Basler Electric DECS125-15 Excitation Control with Power Module -
 Basler Electric BE1-87G Differential Relay
Basler Electric BE1-87G Differential Relay -
 Basler Electric BE1-11 Protection System I5A3M2P2N0EA00
Basler Electric BE1-11 Protection System I5A3M2P2N0EA00 -
Basler Electric DECS-200-1C Excitation Control System
-
Basler Electric BE1-11g Generator Protection Relay
-
Basler Electric DECS 125-15-B2C1 V2.0.9 Excitation Control
-
 Basler Electric BE1-81O/UT3ED1JA7N2F Frequency Relay
Basler Electric BE1-81O/UT3ED1JA7N2F Frequency Relay -
Basler Electric BE1-81O/UT3EE1YB7N1F Frequency Relay
-
 Basler Electric DECS-200-1L Digital Excitation Control System
Basler Electric DECS-200-1L Digital Excitation Control System -
Basler DECS125-15-B2C1 Excitation Control
-
 Basler 9507900205 SSR Retrofit Voltage Regulator
Basler 9507900205 SSR Retrofit Voltage Regulator -
 Basler BE2000E Digital Voltage Regulator
Basler BE2000E Digital Voltage Regulator -
 Basler BE1-GPS Generator Protection System
Basler BE1-GPS Generator Protection System -
Basler DECS-250-CN1CN1N Digital Excitation Control
-
 Basler DGC-2020 Genset Controller
Basler DGC-2020 Genset Controller -
 Basler BE1-81O UT3ED1LA7N0F Frequency Relay (Variant)
Basler BE1-81O UT3ED1LA7N0F Frequency Relay (Variant) -
 Basler BE1-81O UT3EE1YA9S0F Frequency Relay (Variant)
Basler BE1-81O UT3EE1YA9S0F Frequency Relay (Variant) -
Basler BE1-81O Over/Under Frequency Relay
-
Basler DECS125-15 Digital Excitation Control
-
Basler Electric BE1-951 Overcurrent Protection System
-
 Basler Electric BE1-700V Digital Protective Relay
Basler Electric BE1-700V Digital Protective Relay -
 Basler Electric APR63-5 Automatic Voltage Regulator
Basler Electric APR63-5 Automatic Voltage Regulator -
Basler Electric BE1-851 Overcurrent Protection System
-
Basler Electric DECS-250-LN1SN1N Excitation Control
-
 Basler Electric BE1-87T Transformer Differential Relay
Basler Electric BE1-87T Transformer Differential Relay -
Basler Electric DECS-200-1L Excitation Control System
-
 Basler Electric 9310300100 DECS-300 Excitation Control
Basler Electric 9310300100 DECS-300 Excitation Control -
 Basler Electric SSE-N 125-4.5KW Shunt Exciter Regulator
Basler Electric SSE-N 125-4.5KW Shunt Exciter Regulator -
 Basler Electric DGC-2020HD-5NS1DNSBA Genset Controller
Basler Electric DGC-2020HD-5NS1DNSBA Genset Controller -
Basler Electric BE1-81-O/UT3EE1JB7N1F Frequency Relay
-
Basler Electric BE1-81T1EE1WA0N1F Frequency Relay
-
 Basler Electric BE1-25M1EA6PN5R1F Sync-Check Relay
Basler Electric BE1-25M1EA6PN5R1F Sync-Check Relay -
 Basler Electric BE1-GPS Generator Protection System
Basler Electric BE1-GPS Generator Protection System -
Basler Electric DECS-250-LN1SN1N Excitation Control Rev V
-
 Basler Electric DECS-250-CN2CN1N Excitation Control
Basler Electric DECS-250-CN2CN1N Excitation Control -
Basler Electric BE1-50/51B-207 Overcurrent Relay
-
Basler Electric DECS-300-C0N0 Excitation Control System
-
Basler Electric DECS-200 Digital Excitation Control System
-
Basler Electric DECS-250-LN1CN1N Excitation Unit
-
Basler Electric DECS-250 LN2SA1D Excitation Unit Specs
-
Basler Electric BE1-87T Transformer Relay Review
-
Basler Electric BE1-11 Protection System
-
Basler Electric BE1-GPS100-E4N1H1N Protection System
-
 Allen-Bradley 442G-MABH-R Safety Module
Allen-Bradley 442G-MABH-R Safety Module -
 Beckhoff CX1030-0111 PLC Assembly Profile
Beckhoff CX1030-0111 PLC Assembly Profile -
 FANUC IC693CPU364 PLC Module
FANUC IC693CPU364 PLC Module -
 Orange Denmark Type 200816 220 PLC Specs
Orange Denmark Type 200816 220 PLC Specs -
 OMRON C200H-SNT31 Sysmac PLC Module
OMRON C200H-SNT31 Sysmac PLC Module -
 Allen Bradley 20AB022A3AYNANC0 PowerFlex 70
Allen Bradley 20AB022A3AYNANC0 PowerFlex 70 -
 OMRON C200HW-PCU01 Position Control Unit
OMRON C200HW-PCU01 Position Control Unit -
 ABB AO845A-eA Analog Output Module
ABB AO845A-eA Analog Output Module -
 OMRON CJ1M-CPU22 CPU Unit
OMRON CJ1M-CPU22 CPU Unit -
 Allen Bradley 100-E265ED11 Contactor
Allen Bradley 100-E265ED11 Contactor -
 Honeywell 51304511-100 Interface Module
Honeywell 51304511-100 Interface Module -
 SOLEXY BXF3S0101N0018 Gateway Module
SOLEXY BXF3S0101N0018 Gateway Module -
 OMRON CJ2H-CPU65 CPU Unit
OMRON CJ2H-CPU65 CPU Unit -
 Automation Direct GS2-45P0 AC Drive
Automation Direct GS2-45P0 AC Drive -
 M68-2000 2-Axis Motion CNC Controller
M68-2000 2-Axis Motion CNC Controller -
 OMRON CJ1M-CPU11 V3.0 PLC CPU Unit
OMRON CJ1M-CPU11 V3.0 PLC CPU Unit -
 OMRON CJ1W-NC413 4-Axis Positioning Controller
OMRON CJ1W-NC413 4-Axis Positioning Controller -
 OMRON 3G2A3-PRO16 Programming Console HMI
OMRON 3G2A3-PRO16 Programming Console HMI -
 Siemens 3VT8440-2AA04-2GA2 Molded Case Circuit Breaker
Siemens 3VT8440-2AA04-2GA2 Molded Case Circuit Breaker -
 Siemens 3RT5045 Contactor Series
Siemens 3RT5045 Contactor Series -
 OMRON C200HS-CPU01-E SYSMAC PLC Controller
OMRON C200HS-CPU01-E SYSMAC PLC Controller -
 OMRON C500-NC103-E Positioning Control Unit
OMRON C500-NC103-E Positioning Control Unit -
 OMRON CJ1W-TC001 Temperature Control Unit
OMRON CJ1W-TC001 Temperature Control Unit





