
Schneider ELAU PacDrive C400/C400 A8 Controller
Schneider ELAU PacDrive C400/C400 A8 Controller
Product core positioning and system architecture
1. Core positioning
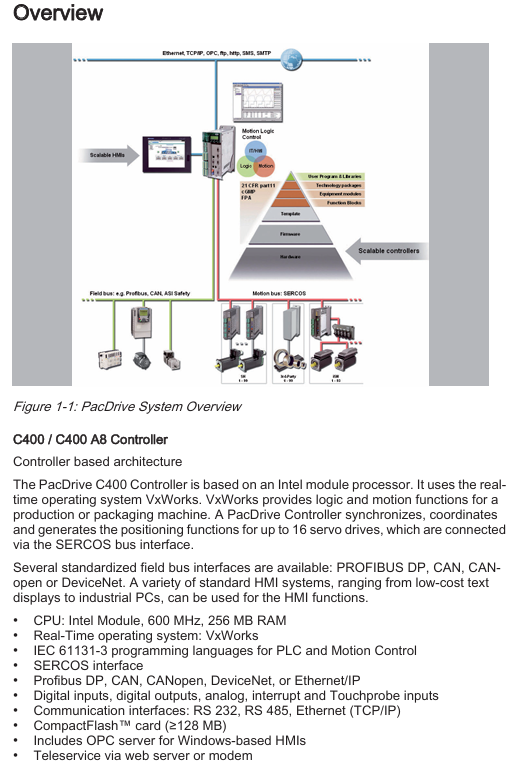
The PacDrive C400/C400 A8 is a high-performance motion controller based on a real-time operating system, designed specifically for industrial equipment that requires multi axis synchronization and precise positioning. Its core function is to coordinate servo drives to complete complex motion control tasks (such as cam synchronization, electronic gears, and multi axis interpolation), while supporting logic control and industrial communication, and adapting to automated production lines such as packaging, printing, and assembly.
2. System architecture
Hardware Core: Equipped with Intel processors (C400 for Pentium M 600MHz, C400 A8 for Celeron M 600MHz), 256MB RAM, 128kB NVRAM, and ≥ 128MB CompactFlash card (for program storage and data backup), ensuring real-time computation and data stability.
Real time operating system: Equipped with VxWorks real-time system, it has fast response speed, supports multitasking parallel processing, and meets the demand for "microsecond level" real-time performance in motion control.
Core bus: Connected to servo drives through SERCOS real-time motion bus (C400 supports up to 16 SERCOS slave stations, C400 A8 supports up to 8), achieving multi axis synchronous control; Simultaneously equipped with fieldbus such as PROFIBUS DP and CANopen, balancing logic control and device interconnection.
Core functions and technical features
1. Motor control ability
Multi axis control: C400 supports 16 servo axes, and C400 A8 supports 8 servo axes. All axes are compatible with full cycle control of SERCOS bus (such as 1ms/2ms/4ms cycle), which can achieve complex movements such as electronic gear, electronic cam, and multi axis interpolation, meeting high-precision synchronization requirements (such as film traction and cutter synchronization of packaging machines).
Cam and sequence control: Supports up to 256 dynamic cam groups, and cam curves can be customized through software; Sequence control supports three modes of "continuous/cycle/event triggering", adapted to the step-by-step action logic of the production line (such as workstation switching on the assembly line).
Position detection and feedback: equipped with 1 SinCos main encoder interface and 1 incremental main encoder interface (X11), supporting external position feedback; Simultaneously providing 16 Touchprobe trigger inputs (X4) with a resolution of 100 μ s, it can achieve precise positioning capture (such as product positioning detection).
2. Logic control and I/O expansion
PLC function: Supports IEC 61131-3 standard programming language (instruction list IL, ladder diagram LD, function block diagram FBD, structured text ST, etc.), can simultaneously handle motion control and logic control tasks (such as equipment start stop, safety interlock, fault diagnosis); PLC instruction execution speed is fast, with only 7 μ s required for 1000 instructions and a fast task cycle of up to 250 μ s.
Local I/O configuration:
Digital input: 20 channels (DC 20-33V, supporting 1/5ms parameterized filtering), used for detecting sensor signals (such as photoelectric switches, limit switches).
Digital output: 16 channels (DC 20-30V, rated current 250mA per channel, short circuit protection), used to control actuators (such as solenoid valves, indicator lights).
Analog I/O: 2 analog inputs (-10~10V or 0~20mA, 12 bit resolution), 2 analog outputs (-10~10V, 12 bit resolution), compatible with analog devices such as pressure sensors and proportional valves.
Fast I/O: 4-channel interrupt input (X4, 0.1/1ms filtering), used to process high-speed trigger signals (such as emergency stop, safety door signals).
Scalability: Up to 128 digital inputs/outputs and 128 Touchprobe inputs can be expanded through the PacNet interface; Through PROFIBUS DP, 126 slave stations can be connected, with a maximum expansion of 3584 bytes of digital/analog I/O, meeting the signal acquisition and control requirements of large-scale production lines.
3. Industrial communication and data exchange
Communication interface:
Motion bus: SERCOS (16MBaud), used for connecting servo drives to achieve multi axis synchronization.
Fieldbus: PROFIBUS DP (master/slave mode, 12MBaud), CANopen, DeviceNet (adapter required), EtherNet/IP (optional hardware module required), supporting interconnection with PLC, HMI, sensors and other devices.
General communication: RS232 (COM1), RS485 (COM2), Ethernet (10/100Base-T, supporting TCP/IP), used for program download, data monitoring, and remote maintenance.
Data exchange and remote services:
Built in OPC server, supports real-time data access for Windows based HMI (such as Schneider Vijeo Designer), and realizes device status visualization.
Support remote services between web servers and modems, enabling device diagnostic information to be obtained through browsers or SMS (SMTP protocol), simplifying on-site maintenance.
Integrated data logger (27kB) and trajectory logger (8 channels, 1ms resolution), capable of recording fault information and motion curves for troubleshooting and process optimization.
- OMRON
- ABB
- General Electric
- EMERSON
- Honeywell
- HIMA
- ALSTOM
- Rolls-Royce
- MOTOROLA
- Rockwell
- Siemens
- Woodward
- YOKOGAWA
- FOXBORO
- KOLLMORGEN
- MOOG
- KB
- YAMAHA
- BENDER
- TEKTRONIX
- Westinghouse
- AMAT
- AB
- XYCOM
- Yaskawa
- B&R
- Schneider
- KONGSBERG
- NI
- WATLOW
- ProSoft
- SEW
- ADVANCED
- Reliance
- TRICONEX
- METSO
- MAN
- Advantest
- STUDER
- DANAHER MOTION
- Bently
- Galil
- EATON
- MOLEX
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- Beijer
- Moxa
- Rexroth
- Johnson
- WAGO
- TOSHIBA
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- Application field
- XP POWER
- CTI
- TRICON
- STOBER
- Thinklogical
- Horner Automation
- Meggitt
- Fanuc
- Baldor
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- Iba
- Beckhoff
- ADLINK
-
 Basler Electric BE3-32-3AC Reverse Power Relay 9 1376 00 105
Basler Electric BE3-32-3AC Reverse Power Relay 9 1376 00 105 -
 Basler Electric BE3-25-1A1N4 Synch Check Relay 9319100100
Basler Electric BE3-25-1A1N4 Synch Check Relay 9319100100 -
 Basler Electric SR4A-2B15B3A Static Voltage Regulator
Basler Electric SR4A-2B15B3A Static Voltage Regulator -
 Basler Electric SR4A-2B15B3E Static Voltage Regulator
Basler Electric SR4A-2B15B3E Static Voltage Regulator -
 Basler Electric 9170818100 Solid State Protective Relay
Basler Electric 9170818100 Solid State Protective Relay -
 Basler Electric AEC63-7 Analog Excitation Controller
Basler Electric AEC63-7 Analog Excitation Controller -
 Basler Electric 17483 Auxiliary Module
Basler Electric 17483 Auxiliary Module -
 Basler Electric BE1-59 Over Voltage Relay
Basler Electric BE1-59 Over Voltage Relay -
 Basler Electric 21600-101 Control Module
Basler Electric 21600-101 Control Module -
 Basler Electric KR2F Generator Voltage Regulator 9056600100
Basler Electric KR2F Generator Voltage Regulator 9056600100 -
 Basler BE1-CDS Current Differential System
Basler BE1-CDS Current Differential System -
 Basler Electric CBS 212 Current Boost System 9 2650 00 100
Basler Electric CBS 212 Current Boost System 9 2650 00 100 -
 Basler Electric IFM-150 Firing Circuit Chassis
Basler Electric IFM-150 Firing Circuit Chassis -
 Basler Electric BE1-60 Voltage Balance Relay C1F A1P D0C3F
Basler Electric BE1-60 Voltage Balance Relay C1F A1P D0C3F -
 Basler Electric BE1-32R Power Relay A2E D1R A0N0F
Basler Electric BE1-32R Power Relay A2E D1R A0N0F -
Basler Electric BE1-32R Power Relay A2E D1R A0N0F
-
 Basler Electric 8650C80G01 Isolation Transducer PCB Board
Basler Electric 8650C80G01 Isolation Transducer PCB Board -
 ETEL EA-P2M-300-4/7.5A-0100-01 AccurET Modular 300 Servo Drive
ETEL EA-P2M-300-4/7.5A-0100-01 AccurET Modular 300 Servo Drive -
 Basler Electric 87T Transformer Differential Relay
Basler Electric 87T Transformer Differential Relay -
 Basler Electric BE-6868 Power Transformer 5950007559202
Basler Electric BE-6868 Power Transformer 5950007559202 -
 Basler Electric PRS250 Veri-Sync Relay 9088800102
Basler Electric PRS250 Veri-Sync Relay 9088800102 -
 Basler Electric SCP-250-G-60 VAR Power Factor Controller
Basler Electric SCP-250-G-60 VAR Power Factor Controller -
 Basler DECS-150 AVR 1NS2V1N1S Voltage Regulator
Basler DECS-150 AVR 1NS2V1N1S Voltage Regulator -
 Basler UFOV 260A Under Frequency Overvoltage Module
Basler UFOV 260A Under Frequency Overvoltage Module -
 Basler MOC2 199 Motor Operated Control – Overview and Setup
Basler MOC2 199 Motor Operated Control – Overview and Setup -
 Basler BE3-49R-5K5A1 Temperature Relay – Complete Guide
Basler BE3-49R-5K5A1 Temperature Relay – Complete Guide -
Basler BE 20035 001 Transformer – Technical Data and Installation
-
 Basler BE 02727 001 Transformer – Specifications and Usage
Basler BE 02727 001 Transformer – Specifications and Usage -
 Basler BE127 Under Voltage Relay – Features and Application Guide
Basler BE127 Under Voltage Relay – Features and Application Guide -
Basler CBS377 Current Boost System – Complete Technical Guide
-
 Basler BE1-87G P/N 9170818100 Differential Relay – In-Depth Specs
Basler BE1-87G P/N 9170818100 Differential Relay – In-Depth Specs -
Basler BE1-87G Generator Differential Relay – Technical Overview
-
Basler Electric SR4A2B16 SVR Static Voltage Regulator – Complete Guide
-
 Basler Electric 9261500101 Power Supply Module
Basler Electric 9261500101 Power Supply Module -
 Basler Electric AEM-2020 Analog Expansion Module
Basler Electric AEM-2020 Analog Expansion Module -
Basler Electric DGC-2020 Digital Genset Controller 51BRBNEAH001
-
Basler Electric BE1-59N Ground Fault Overvoltage Relay
-
 Basler Electric BE1-59N-A5E-E1L-N0S1F Neutral Overvoltage Relay
Basler Electric BE1-59N-A5E-E1L-N0S1F Neutral Overvoltage Relay -
Basler Electric MOC2499 Motor Operator Control Potentiometer 9072300430
-
 Basler Electric BE1-50/51M Overcurrent Relay
Basler Electric BE1-50/51M Overcurrent Relay -
 Basler Electric 9148100106 MOC3502 Solid State Relay 250VDC 0.25A
Basler Electric 9148100106 MOC3502 Solid State Relay 250VDC 0.25A -
 Basler Electric CBS 212 Current Boost System 9265000100
Basler Electric CBS 212 Current Boost System 9265000100 -
 Basler Electric 10493002 Control Module
Basler Electric 10493002 Control Module -
Basler BE1-32R D3E E1R A0N1F Power Relay
-
 Basler SR8A2B15B3A Static Voltage Regulator
Basler SR8A2B15B3A Static Voltage Regulator -
 Basler IFM-105 Firing Circuit Chassis 9324100105
Basler IFM-105 Firing Circuit Chassis 9324100105 -
Basler SR4A2B05B3A Static Voltage Regulator
-
 Basler BE151G1EB6PB0N0F Protective Relay
Basler BE151G1EB6PB0N0F Protective Relay -
Basler BE1-59 Electric Over Voltage Relay
-
 Basler 277 Static Programmable Powerline Carrier Channel
Basler 277 Static Programmable Powerline Carrier Channel -
 Basler BE1-32R D1E A1P A0N1F Power Relay
Basler BE1-32R D1E A1P A0N1F Power Relay -
Basler SR4A1B07B3A Static Voltage Regulator
-
 Basler Electric BE1-700 Digital Protective Relay
Basler Electric BE1-700 Digital Protective Relay -
Basler Electric SR8A-2B01B3A Static Voltage Regulator
-
 Basler Electric SR4A-2B01B3E Static Voltage Regulator
Basler Electric SR4A-2B01B3E Static Voltage Regulator -
 Basler Electric 9017709102 PC Board
Basler Electric 9017709102 PC Board -
Basler Electric SR4A-2B01B3A Static Voltage Regulator
-
 Basler Electric PRS-250 Veri-Sync Relay
Basler Electric PRS-250 Veri-Sync Relay -
 Basler Electric 9066800102 Excitation Support System
Basler Electric 9066800102 Excitation Support System -
Basler Electric BE1-87G Generator Differential Relay 9 1708 18 100
-
 Basler Electric 36T865-2 BE03752001 Power Supply
Basler Electric 36T865-2 BE03752001 Power Supply -
 Basler Electric M-300 149D940G02 Power Supply
Basler Electric M-300 149D940G02 Power Supply -
 Basler Electric ACA2040-25GM 4Mp 25Fps Area Scan Camera
Basler Electric ACA2040-25GM 4Mp 25Fps Area Scan Camera -
 Basler BE1-87G-S1A-A1C-A0N0 Differential Relay
Basler BE1-87G-S1A-A1C-A0N0 Differential Relay -
Basler SR8A-2B06B3E Static Regulator SR8A2B06B3E
-
 Basler SCP-210 Frequency Controller 9095400100
Basler SCP-210 Frequency Controller 9095400100 -
 Basler BE1-59-A3E-A1J-N1N3F Overvoltage Relay BE159A3EA1JN1N3F
Basler BE1-59-A3E-A1J-N1N3F Overvoltage Relay BE159A3EA1JN1N3F -
Basler 9 2011 11 100 Bracket Mounted Terminal Unit
-
Basler 9 1606 00 101 Voltage Regulator
-
 Basler CBS-377 Current Boost System 9109600102
Basler CBS-377 Current Boost System 9109600102 -
 Basler 8650C72 Exciter Control Module PCB Rev 5
Basler 8650C72 Exciter Control Module PCB Rev 5 -
 Basler C2EE1PA0N1F BE1-32R Reverse Power Relay
Basler C2EE1PA0N1F BE1-32R Reverse Power Relay -
 ADLINK HPCI-14S12U - Industrial Control Backplane 12PCI Backplane PCI-14S Passive Backplane
ADLINK HPCI-14S12U - Industrial Control Backplane 12PCI Backplane PCI-14S Passive Backplane -
-0010.png) ADLINK PCIe-GIE74C - image acquisition card 4-CH GigE Vision PoE+ Frame Grabber
ADLINK PCIe-GIE74C - image acquisition card 4-CH GigE Vision PoE+ Frame Grabber -
-0010_1.png) ADLINK PCI-8164 - control card 4-Axis Advanced Motion Controller Board
ADLINK PCI-8164 - control card 4-Axis Advanced Motion Controller Board -
 ADLINK PCIe-U304 - 4 Port USB3 PCIe Frame Grabbers USB Screw Hole Card
ADLINK PCIe-U304 - 4 Port USB3 PCIe Frame Grabbers USB Screw Hole Card -
 ADLINK PCI-9112 - Multi-Function Data Acquisition Card DAQ Card
ADLINK PCI-9112 - Multi-Function Data Acquisition Card DAQ Card -
 ADLINK PCI-7432 - 51-12013-0A50 4-CH Isolated Numérique I/O PCI Cartes Digital I/O Card
ADLINK PCI-7432 - 51-12013-0A50 4-CH Isolated Numérique I/O PCI Cartes Digital I/O Card -
 ADLINK PCA-6106P3-0C1 REV.C1 - backplane 6-Slot Passive Backplane Board
ADLINK PCA-6106P3-0C1 REV.C1 - backplane 6-Slot Passive Backplane Board -
 ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Board
ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Board -
 ADLINK CPCI-7433R(G) - Digital Input Board Rear I/O CompactPCI Card
ADLINK CPCI-7433R(G) - Digital Input Board Rear I/O CompactPCI Card -
 ADLINK EBP-13E4 - 51-46703-0A30 Industrial PC Backplane Passive Backplane
ADLINK EBP-13E4 - 51-46703-0A30 Industrial PC Backplane Passive Backplane -
 ADLINK PCIE-HDV62 - Image acquisition card High Definition Video Frame Grabber
ADLINK PCIE-HDV62 - Image acquisition card High Definition Video Frame Grabber -
 ADLINK EBP-13E4 - 51-46703-0A30 Industrial Backplane Board Passive Backplane
ADLINK EBP-13E4 - 51-46703-0A30 Industrial Backplane Board Passive Backplane -
 ADLINK 90111-B1 / CPCI-6770 - PCB CPU MODULE CompactPCI Single Board Computer
ADLINK 90111-B1 / CPCI-6770 - PCB CPU MODULE CompactPCI Single Board Computer -
 ADLINK PCI-7248 - DATA ACQUISITION PCI CARD 48-CH Parallel Digital I/O Board
ADLINK PCI-7248 - DATA ACQUISITION PCI CARD 48-CH Parallel Digital I/O Board -
 ADLINK PCI-7230 - 51-12003-0a50 board PCI7230 32-CH Isolated Digital I/O Card
ADLINK PCI-7230 - 51-12003-0a50 board PCI7230 32-CH Isolated Digital I/O Card -
 ADLINK PCI2A000CB - 51-20000-0B30 Multi-Function DAQ Card Baseboard
ADLINK PCI2A000CB - 51-20000-0B30 Multi-Function DAQ Card Baseboard -
 ADLINK PCI-8134-005 - 4-Axis Motion Controller Card
ADLINK PCI-8134-005 - 4-Axis Motion Controller Card -
 ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Card
ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Card -
 ADLINK PCI-7434 - 64-CH Isolated Digital Output Card
ADLINK PCI-7434 - 64-CH Isolated Digital Output Card -
 ADLINK PCI-8132 - motion control card 2-Axis Servo & Stepper Controller
ADLINK PCI-8132 - motion control card 2-Axis Servo & Stepper Controller -
 ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board
ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board -
 ADLINK PCI-8164 - Motion Control Card 51-12406-0A40 4-Axis Controller
ADLINK PCI-8164 - Motion Control Card 51-12406-0A40 4-Axis Controller -
 ADLINK 51-12001-0C20 - Circuit Board Data Acquisition Interface Module Hardware
ADLINK 51-12001-0C20 - Circuit Board Data Acquisition Interface Module Hardware -
 ADLINK NuPR0-840 - industrial control motherboard Full-Size PICMG CPU Board
ADLINK NuPR0-840 - industrial control motherboard Full-Size PICMG CPU Board -
 ADLINK PCI-7444 - 51-12023-0A10 card 128-CH Isolated Digital Output Board
ADLINK PCI-7444 - 51-12023-0A10 card 128-CH Isolated Digital Output Board -
 ADLINK PCI-1612B - data acquisition card 4-Port RS-232/422/485 Serial Communication Card
ADLINK PCI-1612B - data acquisition card 4-Port RS-232/422/485 Serial Communication Card -
 ADLINK PCI-6208V 009 - 8/16-CH 16-Bit Analog Output Cards PCB-I-E-482=6BX3
ADLINK PCI-6208V 009 - 8/16-CH 16-Bit Analog Output Cards PCB-I-E-482=6BX3 -
 ADLINK NUPRO-935A/LV - industrial control motherboard Full-Size PICMG SBC Board
ADLINK NUPRO-935A/LV - industrial control motherboard Full-Size PICMG SBC Board -
 ADLINK PCI-9114DG - Multi-Function DAQ Card Data Acquisition PCI Card
ADLINK PCI-9114DG - Multi-Function DAQ Card Data Acquisition PCI Card -
 ADLINK ACL-7130 - Data acquisition card Isolated Digital I/O Board
ADLINK ACL-7130 - Data acquisition card Isolated Digital I/O Board -
 ADLINK ABX-6300D-4E1-BP - board ABX6300D4E1BP Video Interface Expansion Card
ADLINK ABX-6300D-4E1-BP - board ABX6300D4E1BP Video Interface Expansion Card -
 ADLINK CPCI-6940 - CPCI-6940/D1539/M16-0(EA)-000E 6U CompactPCI Processor Board
ADLINK CPCI-6940 - CPCI-6940/D1539/M16-0(EA)-000E 6U CompactPCI Processor Board -
 ADLINK NuPRO-760 - industrial control motherboard Half-Size PICMG SBC CPU Board
ADLINK NuPRO-760 - industrial control motherboard Half-Size PICMG SBC CPU Board -
 ADLINK IMB-M42H (G)-0020 - industrial control motherboard LGA1155 Micro-ATX Mainboard
ADLINK IMB-M42H (G)-0020 - industrial control motherboard LGA1155 Micro-ATX Mainboard -
 ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board
ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board -
 ADLINK PCI-8134 - 4-Axis Servo & Stepper Motion Controller Card
ADLINK PCI-8134 - 4-Axis Servo & Stepper Motion Controller Card -
 ADLINK MXC-6101D - V.PC000.002.ST.00 Box PC Configurable Embedded Computer
ADLINK MXC-6101D - V.PC000.002.ST.00 Box PC Configurable Embedded Computer -
.png) ADLINK PCI-8134A - 51-12421-0A10 Motion Control Card 4-Axis Controller Card
ADLINK PCI-8134A - 51-12421-0A10 Motion Control Card 4-Axis Controller Card -
 ADLINK DIN-100S / DIN-100SA1 - Technology SCSI-II TB 100-PIN Terminal Block Board
ADLINK DIN-100S / DIN-100SA1 - Technology SCSI-II TB 100-PIN Terminal Block Board -
.png) ADLINK DIN-812M001 / DIN812M001 - 51-14034-0A1 51140340A1 Terminal Module Breakout Interface
ADLINK DIN-812M001 / DIN812M001 - 51-14034-0A1 51140340A1 Terminal Module Breakout Interface -
_1.png) ADLINK PCI-8164 - Servo motion control 4-Axis Advanced Controller Card
ADLINK PCI-8164 - Servo motion control 4-Axis Advanced Controller Card -
 ADLINK PCIe-GIE64 - Acquisition card GigE Vision PoE+ Frame Grabber
ADLINK PCIe-GIE64 - Acquisition card GigE Vision PoE+ Frame Grabber -
 ADLINK M-302 - Industrial control motherboard ATX PC Board Mainboard
ADLINK M-302 - Industrial control motherboard ATX PC Board Mainboard -
 ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board
ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board -
 ADLINK PCI-RTV24 - Image capture card Analog Video Frame Grabber
ADLINK PCI-RTV24 - Image capture card Analog Video Frame Grabber -
 ADLINK PCI-8102 - Motion control card 2-Axis Servo & Stepper Controller Board
ADLINK PCI-8102 - Motion control card 2-Axis Servo & Stepper Controller Board -
 ADLINK PCI-9112 REV.B1 - Card Multi-Function Data Acquisition Card
ADLINK PCI-9112 REV.B1 - Card Multi-Function Data Acquisition Card -
 ADLINK HSI-DI32-M-N / HSL-TB32-M-DIN - Discrete I/O MODULE Distributed Automation Module System
ADLINK HSI-DI32-M-N / HSL-TB32-M-DIN - Discrete I/O MODULE Distributed Automation Module System -
 ADLINK PCI-7296 - IO card REV.A3 96-CH Parallel Digital I/O Card
ADLINK PCI-7296 - IO card REV.A3 96-CH Parallel Digital I/O Card -
-0020.png) ADLINK DIN-814P-A4 / 814Y - terminal board Motion Control Interface Block
ADLINK DIN-814P-A4 / 814Y - terminal board Motion Control Interface Block -
 ADLINK DIN-814P-A4 - 51-14056-0A10 PCB-I-E-2736=ZA01 Screw Terminal Board Breakout
ADLINK DIN-814P-A4 - 51-14056-0A10 PCB-I-E-2736=ZA01 Screw Terminal Board Breakout -
 ADLINK M-322 - motherboard Industrial Control Computer Mainboard
ADLINK M-322 - motherboard Industrial Control Computer Mainboard -
 ADLINK NUPRO-406 REV:B1 - industrial control motherboard Full-Size PICMG CPU Board
ADLINK NUPRO-406 REV:B1 - industrial control motherboard Full-Size PICMG CPU Board -
 ADLINK AMP-204C - card DSP-Based 4-Axis Advanced Pulse-Train Controller
ADLINK AMP-204C - card DSP-Based 4-Axis Advanced Pulse-Train Controller -
 ADLINK HPCI14S REV.B1 - industrial computer baseboard 14-Slot Passive Backplane
ADLINK HPCI14S REV.B1 - industrial computer baseboard 14-Slot Passive Backplane -
 ADLINK PCI-7250 - 8-CH Relay Output & 8-CH Isolated DI PCI Card
ADLINK PCI-7250 - 8-CH Relay Output & 8-CH Isolated DI PCI Card





