
YASKAWA S-7 series linear servo
YASKAWA S-7 series linear servo
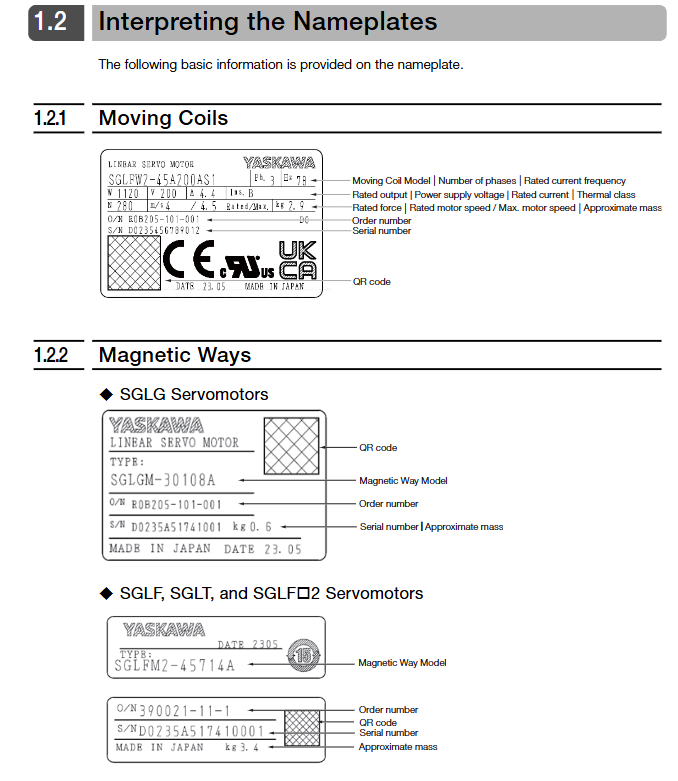
Detailed explanation of product basic information
1. Product classification and model system
(1) Product series division
Series Structure Type Core Characteristics Thrust Range (Rated) Speed Range (Maximum) Applicable Scenarios
SGLG ironless low inertia, silent operation, no cogging effect 12.5-750N, 4.0-5.0 meters/second high-speed reciprocating motion, precision positioning equipment (such as chip packaging machines)
SGLF F-type iron core with high thrust density, supporting self cooling/water cooling 25-2520N 4.0-5.0 meters/second medium to heavy-duty automation equipment (such as conveyor belts, stamping machines)
SGLT T-shaped iron core with high thrust, high rigidity, strong anti-interference ability 130-2000N 2.5-4.8 m/s heavy-duty machine tools, large production lines (such as CNC machine tool spindles)
(2) Model coding rules
Taking SGLFW2-30A070AS1 as an example, the encoding meanings of each segment are as follows:
SGL: Identification of ∑ -7 series linear servo motors;
F: Structural type (F-type iron core);
W2: Component type (rotor);
30: Magnet height (30mm);
A: Supply voltage (200VAC);
070: length of rotor (70mm);
One:
S: Sensor configuration (with polarity sensor+thermal protector);
1: Cooling array
2. Core technical parameters
(1) General parameters
Power supply specifications: Unified at 200VAC (single-phase/three-phase compatible), insulation level B, insulation resistance ≥ 10M Ω (500VDC), withstand voltage 1500VAC/1 minute;
Environmental adaptability: working temperature 0-40 ℃ (no freezing), relative humidity 20% -80% RH (no condensation), altitude ≤ 1000m, protection level IP00;
Mechanical performance: Vibration acceleration ≤ 49m/s ² (in three directions), impact acceleration ≤ 196m/s ² (twice), gap between magnetic track and rotor 0.8-1.4mm (0.5-1.2mm with magnetic cover).
(2) Key performance parameters (typical models)
Series model: Rated thrust, maximum thrust, rated speed, maximum speed, mass of rotor
SGLG SGLGW-40A253C 93N latitude 280 degrees north 2.0 meters/second 5.0 meters/second 0.6 kilograms
SGLF SGLFW2-90A380A 1120N 3360N 4.0 m/s 4.0 m/s 10.1 kg
SGLT SGLTW-50A320H 900N 1800N 2.0 m/s 3.1 m/s 11 kg
3. Core components and accessories
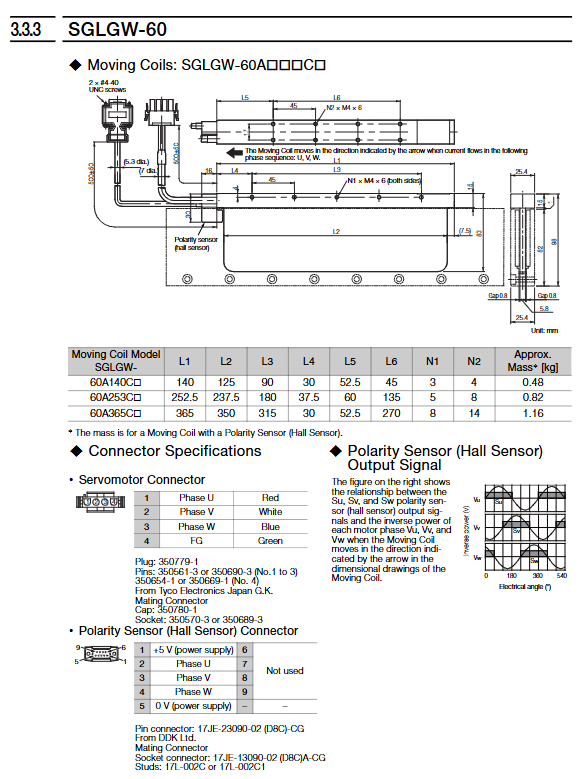
Sensors: polarity sensor (Hall sensor, used for position detection), thermal protector (to prevent motor overheating);
Encoder: compatible with Heidenhain, Renishaw, Mitutoyo and other brands, supports incremental/absolute, with a maximum signal resolution of 1/4096 pitch;
Cables: servo main circuit cables (JZSP-CLN series), encoder cables (JZSP-CLL series), sensor cables (JZSP-CL2L series);
Auxiliary components: Serial conversion unit (JZDP series, converting encoder signals to servo amplifiers), braking resistor, water cooling pipeline (only for water cooling models).
Detailed Explanation of Selection Calculation
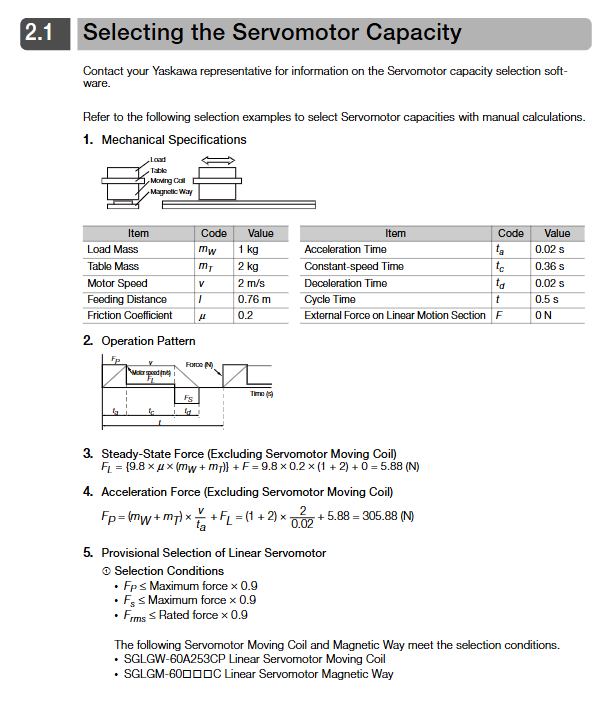
1. Core formula and steps for selection
(1) Basic parameter collection
Key parameters such as load mass (mW), worktable mass (mT), motor rotor mass (mM), target speed (v), acceleration time (t ₐ), deceleration time (td), friction coefficient (μ), and external force (F) need to be clearly defined.
(2) Core Strength Calculation
Steady state thrust (force required for uniform load operation):
F L=9.8×M×(m W+m T+m M)+F
Acceleration thrust (force required during load acceleration phase):
F P=(m W+m T+m M)× t onev+F L
Deceleration thrust (force required during load deceleration phase):
F S=(m W+m T+m M)× t dv−F L
Effective thrust (average thrust during cyclic operation):
F RMS= tF P two⋅t one+F L two⋅t C+F S two⋅t d(t is the total time of the cycle, t_C is the uniform speed time)
(3) Selection verification criteria
Acceleration thrust ≤ maximum motor thrust × 0.9;
Deceleration thrust ≤ maximum motor thrust × 0.9;
Effective thrust ≤ motor rated thrust × 0.9;
The total load mass (mW+mT) is ≤ the maximum allowable load of the motor (to be combined with the configuration of the braking resistor).
2. Selection Example (Taking SGLGW-60A253C as an Example)
Known conditions: load mass of 1kg, worktable mass of 2kg, rotor mass of 0.82kg, speed of 2m/s, acceleration time of 0.02s, friction coefficient of 0.2, external force of 0N;
Calculation results: Steady state thrust of 7.5N, acceleration thrust of 389.5N, effective thrust of 108.3N;
Verification: The maximum thrust of the motor is 440N × 0.9=396N (≥ 389.5N), and the rated thrust is 140N × 0.9=126N (≥ 108.3N). The selection is qualified.
Installation specifications (mechanical+electrical)
1. Mechanical installation specifications
(1) Installation environment requirements
Environmental restrictions: Indoor use, no corrosive gases (such as hydrogen sulfide), explosive gases, no strong magnetic field interference (away from electromagnets and large transformers);
Strong magnetic protection: The magnetic track contains neodymium iron boron strong permanent magnets and should be kept away from electronic medical equipment such as pacemakers (safety distance ≥ 1m). Non magnetic tools (brass, stainless steel) should be used during operation to avoid magnetic substances (nails, wrenches) from approaching and causing compression injuries;
Cleaning requirements: The installation area should be free of dust and metal shavings, and lubricating oil should not be applied to the surface of the magnetic track.
(2) Magnetic track installation operation
Positioning and fixation:
Single segment magnetic track: placed on the equipment positioning platform, with the reference mark (4mm diameter pit) facing the equipment, fixed with a 10.9 grade hex socket screw, tightening torque 3.6-41.5N · m (according to the model: SGLG uses M4 screws, torque 3.6-5.0N · m; SGLT uses M8 screws, torque 29.7-41.5N · m);
Multi segment magnetic track: The distance between adjacent magnetic tracks should be ≥ 30mm, aligned with reference marks, and the gap at the connection should be ≤ 0.1mm to avoid thrust fluctuations.
Gap calibration: The gap between the magnetic track and the rotor should be uniform, measured with a non-magnetic feeler gauge, with an error of ≤± 0.3mm (SGLG series gap 0.8 ± 0.3mm, SGLT series gap 1.0 ± 0.3mm).
(3) Assembly process of moving parts
Preprocessing: Check for cracks in the rotor winding and plastic casing, and ensure that the polarity sensor plug is not damaged;
Fixed rotor: Fix the rotor to the workbench with M4-M8 level screws, with a screw fit length of ≥ 4mm and a tightening torque of 2.4-20N · m (SGLG uses M4 screws with a torque of 2.4N · m; SGLF uses M8 screws with a torque of 20N · m);
Approaching the magnetic track: Slowly move the worktable to bring the rotor closer to the magnetic track, and monitor for any frictional noise during the process;
Gap verification: Insert a 0.8-1.4mm non-magnetic feeler gauge into the gap between the rotor and the magnetic track to ensure uniform clearance throughout the entire stroke;
Cable fixation: The movable cable is fixed in the direction of the worktable movement, with a bending radius of ≥ 15mm (cable diameter<8mm) or ≥ cable diameter × 3 (cable diameter>8mm), to avoid pulling and causing breakage.
(4) Special requirements for water-cooled models (SGLFW2-90A series)
Cooling medium: Deionized water, pH 6.8-8.0, conductivity ≤ 30mS/m, chloride ion content ≤ 50mg/L, no oil stains or impurities;
Flow and pressure: rated flow rate 4L/min, maximum flow rate 6L/min, working pressure ≤ 0.5MPa, instantaneous pressure ≤ 1.0MPa;
Pipeline installation:
Pipeline material: stainless steel or corrosion-resistant plastic, with Rc1/8 tapered pipe thread joints, wrapped with sealing tape to prevent water leakage;
Filtering and protection: Install a ≥ 0.5mm impurity filter at the inlet, and keep the pipeline away from high-temperature components (such as motor windings);
Maintenance requirement: Drain the accumulated water in the pipeline during long-term shutdown to avoid icing damage.
2. Electrical installation specifications
(1) Wiring sequence and principles
Wiring sequence: First connect the servo main circuit cable (U/V/W/FG), then connect the encoder cable, and finally connect the sensor cable (polarity sensor/thermal protector). Live wiring is prohibited;
Grounding requirements:
Ground resistance of servo amplifier: 400V level ≤ 10 Ω, 200V level ≤ 100 Ω;
Motor grounding: The FG terminal is connected to the protective grounding of the equipment, and the cross-section of the grounding wire is ≥ 10mm ² (copper core). The shielding layer is grounded at one end (amplifier side);
Cable separation: The distance between the power cable (main circuit) and the signal cable (encoder/sensor) should be ≥ 30cm. It is forbidden to wire or bundle them in the same pipe to avoid electromagnetic interference.
(2) Core cable selection and connection
Cable type, usage, length limit, recommended model, connection requirements
Servo main circuit cable transmission motor power supply ≤ 20 meters JZSP-CLN11 (SGLG), JZSP-CLN21 (SGLF), JZSP-CLN39 (SGLT) phase U (red), V (white), W (blue) corresponding connection, FG (green yellow) grounding
Encoder cable transmission position detection signal ≤ 50 meters JZSP-CLL00 (Renishaw encoder), JZSP-CLL30 (Heidenhain encoder) shielded twisted pair, away from power cables, with firm and secure joints without looseness
Sensor cable transmission polarity sensor/thermal protector signal ≤ 15 meters JZSP-CLL10 (regular model), JZSP-CL2L100 (model with thermal protector) polarity sensor+5V (red), 0V (black), signal terminal (white/blue) corresponding connection
(3) Serial conversion unit (JZDP series) connection
Function: Convert the sine/cosine signal of the linear encoder into a digital signal, transmit it to the servo amplifier, and receive signals from the polarity sensor and thermal protector;
Power supply requirements: Power supply+5V ± 5%, current consumption ≤ 160mA (excluding encoder and sensor currents);
Signal requirement: Analog input signal amplitude 0.4-1.2V, differential input, to avoid signal attenuation.
Safety regulations and compliance standards
1. Core security requirements
(1) Electrical safety
Power off operation: Disconnect all power sources before maintenance, wait for the servo amplifier CHARGE indicator light to turn off (≥ 5 minutes), use a multimeter to confirm that the main circuit voltage is ≤ 50Vdc before operation;
Static electricity protection: When touching the encoder or serial conversion unit, first release human static electricity (touching the grounded metal), and do not directly touch the pins with your hands;
Leakage protection: Motors with built-in EMC filters may experience leakage currents exceeding 3.5mA, requiring the use of Type B residual current monitors (RCM/RCD).
(2) Mechanical safety
Fall prevention measures: When installed vertically, a counterweight or braking device should be installed to prevent the load from falling during power outages;
Limit protection: Install mechanical limit switches at both ends of the motor stroke to avoid collisions caused by overtravel;
Strong magnetic protection: During transportation and installation, the magnetic track needs to be packaged with special anti magnetic materials to avoid adsorption and compression with other magnetic components.
(3) Operational safety
Personnel qualifications: Only qualified engineers who have received training can carry out installation, wiring, and maintenance;
Prohibition of modification: It is not allowed to disassemble the motor winding, magnetic track or modify the circuit, otherwise the warranty will be invalid and may cause safety accidents;
High temperature protection: When the motor is running, the temperature of the winding and magnetic track may exceed 60 ℃, and a protective cover plate should be installed to avoid touching and scalding.
2. Compliance standards
North American standards: UL 1004-1, UL 1004-6, CSA C22.2 No.100, branch circuit protection requires the use of specified semiconductor fuses;
EU standards: CE certification (EMC Directive 2014/30/EU, LVD Directive 2014/35/EU), compliant with EN 61800-3 (C2 environment) EN 60034-1;
Environmental standards: RoHS Directive 2011/65/EU restricts six hazardous substances such as lead and mercury, and scrap must follow the classification and disposal requirements of the WEEE Directive.
Maintenance and disposal
1. Regular maintenance projects
(1) Daily inspection (daily)
Operating status: Monitor the motor for any abnormal noise or vibration, and observe that the cables are not pulled or worn;
Appearance inspection: The surface of the magnetic track is free of dust and metal shavings, the plastic shell of the rotor is free of cracks, and the screws are not loose;
Indicator light: The servo amplifier no alarm indicator light is on, and the encoder signal is normal.
(2) Regular inspection (annually)
Gap calibration: Use a non-magnetic feeler gauge to re measure the gap between the rotor and the magnetic track. If the deviation exceeds 0.5mm, it needs to be adjusted;
Insulation testing: Disconnect the servo amplifier and measure the resistance between the motor U/V/W terminal and FG terminal with a 500VDC insulation resistance meter. A resistance of ≥ 10M Ω is considered normal;
Cable inspection: The cable shielding layer is not damaged, the joints are firm, and there is no aging or cracking at the bends;
Water cooling system (if any): Check that there is no water leakage in the pipeline, the quality of the cooling medium meets the standard, and the filter is not clogged.
(3) Overhaul cycle (every 5 years)
Contact YASKAWA technical personnel for comprehensive maintenance, including winding insulation testing, magnetic track detection, and sensor calibration;
Replace vulnerable parts: cooling fan (self cooling model), cables (frequently bent scenario), seals (water-cooled model).
2. Troubleshooting
(1) Common faults and solutions
Possible causes and solutions for the fault phenomenon
Abnormal installation spacing of encoder signal, cable interference, encoder damage, adjustment of encoder installation spacing (10-40mm), replacement of shielded cable, detection of encoder output signal
Motor overload alarm for excessive load, short acceleration time, thermal protector triggering to reduce load, extending acceleration time (parameter C1-01), checking thermal protector wiring
Insufficient thrust, large gap between magnetic track and rotor, low power supply voltage, incorrect phase wiring, calibration gap to standard range, detection of power supply voltage (200V ± 10%), verification of U/V/W phase wiring
Cable breakage with a small bending radius, repeated pulling and abrasion, replacement of cables with increased bending radius, fixing cables to avoid pulling, and installation of protective sleeves
(2) Principle of investigation
Turn off the power before troubleshooting, and prohibit live measurement signals;
First check the mechanical parts (gaps, fixing screws), then check the electrical parts (wiring, cables);
When troubleshooting is not possible, record the fault code and operating parameters, and contact YASKAWA technical support.
3. Scrap disposal
Demagnetization treatment: The magnetic track needs to be heated to above 300 ℃ and maintained for 1 hour to eliminate magnetism and avoid damage caused by strong magnetic adsorption;
Classification and disposal: Follow local environmental regulations, separate electronic components (windings, sensors), metal components (magnetic tracks, shells), and plastic components, and recycle them separately;
Prohibited from littering: Components containing permanent magnets and electronic components must be disposed of by professional environmental protection organizations to avoid environmental pollution.
Summary of Key Parameters (Core Commonly Used)
Parameter Category Parameter Name Typical Settings/Range Adjustment Scenarios
Motion parameter acceleration time (C1-01) 0.01-3600s: Prolonged if the startup impact is large, shortened if quick startup is required
The deceleration time of motion parameters (C1-02) is extended from 0.01 to 3600 years due to deceleration overvoltage, and can be shortened by combining with braking resistors
Protection parameter motor overload protection (L1-01) 1-6 levels, single motor drive selects 1-3 levels, multi motor drive selects 0 levels (disabled)
Sensor Parameters Polarity Sensor Mode (T1-01) 0-5 Induction Motor Select 0 (Rotation Tuning), PM Motor Select 4 (Rotation Tuning)
Cooling parameters: Water cooling flow threshold ≥ 4 liters/minute. Water cooling models require flow monitoring. If the threshold is lower, the machine will be shut down
- OMRON
- ABB
- General Electric
- EMERSON
- Honeywell
- HIMA
- ALSTOM
- Rolls-Royce
- MOTOROLA
- Rockwell
- Siemens
- Woodward
- YOKOGAWA
- FOXBORO
- KOLLMORGEN
- MOOG
- KB
- YAMAHA
- BENDER
- TEKTRONIX
- Westinghouse
- AMAT
- AB
- XYCOM
- Yaskawa
- B&R
- Schneider
- KONGSBERG
- NI
- WATLOW
- ProSoft
- SEW
- ADVANCED
- Reliance
- TRICONEX
- METSO
- MAN
- Advantest
- STUDER
- DANAHER MOTION
- Bently
- Galil
- EATON
- MOLEX
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- Beijer
- Moxa
- Rexroth
- Johnson
- WAGO
- TOSHIBA
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- Application field
- XP POWER
- CTI
- TRICON
- STOBER
- Thinklogical
- Horner Automation
- Meggitt
- Fanuc
- Baldor
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- Iba
- Beckhoff
-
 Basler DECS-200-2L Digital Excitation Control
Basler DECS-200-2L Digital Excitation Control -
 Basler BE1-47N Voltage Phase Sequence Relay
Basler BE1-47N Voltage Phase Sequence Relay -
 Basler AEC63-7 Analog Excitation Controller 220-277V
Basler AEC63-7 Analog Excitation Controller 220-277V -
 Basler BE1-50/51B-107 Overcurrent Relay
Basler BE1-50/51B-107 Overcurrent Relay -
 Basler Electric BE1‑32R BE1‑E1P‑BON0F Protective Relay
Basler Electric BE1‑32R BE1‑E1P‑BON0F Protective Relay -
 Basler BE1-25 Solid State Time Overcurrent Relay M1EA6PA5S1F
Basler BE1-25 Solid State Time Overcurrent Relay M1EA6PA5S1F -
 Basler MVC 232 Manual Voltage Control Module 90 37000 103 60VAC 55VDC
Basler MVC 232 Manual Voltage Control Module 90 37000 103 60VAC 55VDC -
 Basler RAL6144-16GM Racer GigE Line Scan Camera
Basler RAL6144-16GM Racer GigE Line Scan Camera -
 Basler SSR 63-12 Static Voltage Regulator
Basler SSR 63-12 Static Voltage Regulator -
 Basler BE1-51A Overcurrent Relay
Basler BE1-51A Overcurrent Relay -
 Basler BE1-87T Solid State Protective Relay
Basler BE1-87T Solid State Protective Relay -
 Basler SR4A2B01B3A Static Voltage Regulator
Basler SR4A2B01B3A Static Voltage Regulator -
 Basler SSR 32-12 Static Voltage Regulator
Basler SSR 32-12 Static Voltage Regulator -
 Basler TRR00696 Transformer 1KVA 115V
Basler TRR00696 Transformer 1KVA 115V -
 Basler DECS-100-B15 AVR Replacement
Basler DECS-100-B15 AVR Replacement -
Basler BE1-27 Under-Voltage Relay
-
 Basler ACA2000-50GM Interface Module
Basler ACA2000-50GM Interface Module -
 Basler AEC63-7 Analog Excitation Controller
Basler AEC63-7 Analog Excitation Controller -
 Basler PRS 250 Veri-Sync Relay
Basler PRS 250 Veri-Sync Relay -
 Basler SR4A-2B15B3A Static Voltage Regulator
Basler SR4A-2B15B3A Static Voltage Regulator -
Basler BE1-32R Power Relay
-
Basler SR8A-2B06B3E Static Voltage Regulator
-
Basler BE1-81 O/U Frequency Relay
-
 Basler BE1-51A-K2E-W6M-B1N0F Overcurrent Relay
Basler BE1-51A-K2E-W6M-B1N0F Overcurrent Relay -
Basler BE1-851 Overcurrent Relay G3A1S1 – 48-125V AC/DC
-
 Basler BEI-51 Overcurrent Relay – NSN 5945-01-293-2363
Basler BEI-51 Overcurrent Relay – NSN 5945-01-293-2363 -
Basler Electric L301KC Protective Relay – L301KC
-
 Basler DECS-100-B15 Automatic Voltage Regulator – Generator AVR
Basler DECS-100-B15 Automatic Voltage Regulator – Generator AVR -
 Basler SR4A-2B15B3A Static Voltage Regulator – SR4A2B15B3A
Basler SR4A-2B15B3A Static Voltage Regulator – SR4A2B15B3A -
 Basler UF 312 Under Frequency Protective Module – 9094700100
Basler UF 312 Under Frequency Protective Module – 9094700100 -
Basler Electric MVC 232 Manual Control Module – 60VAC 55VDC 20A
-
Basler PRS 250 Veri-Sync Relay – Generator Synchronizing Relay
-
 Basler DECS-100-A05 Digital Regulator Review
Basler DECS-100-A05 Digital Regulator Review -
 Basler AEM-2020 Analog Expansion Module Specs
Basler AEM-2020 Analog Expansion Module Specs -
 Basler DECS-100-B15 Digital Excitation Specs
Basler DECS-100-B15 Digital Excitation Specs -
Basler Electric 9125600106 Regulator Component
-
Basler BE1-51A-K1E-W6M-B1N0F Overcurrent Relay
-
 Basler MVC-301 MVC 300 Excitation Controller
Basler MVC-301 MVC 300 Excitation Controller -
 Basler SSR 32-12 Static Voltage Regulator
Basler SSR 32-12 Static Voltage Regulator -
 Basler 9-2849-00-101 Control Module
Basler 9-2849-00-101 Control Module -
Basler BE1-51A Overcurrent Relay
-
 Basler BE1-51/27R Overcurrent Relay
Basler BE1-51/27R Overcurrent Relay -
 Basler BE1-51 Overcurrent Relay
Basler BE1-51 Overcurrent Relay -
 Basler SR8A-2B15B3A Static Voltage Regulator
Basler SR8A-2B15B3A Static Voltage Regulator -
 Basler BE32965001 Transformer and Timer Board
Basler BE32965001 Transformer and Timer Board -
 Basler 9174700100 EL200-7 Excitation Limiter
Basler 9174700100 EL200-7 Excitation Limiter -
 Basler BE2000E AVR Voltage Regulator
Basler BE2000E AVR Voltage Regulator -
Basler BE1-87G Differential Relay
-
 Basler BE21834001 Generator Control Module
Basler BE21834001 Generator Control Module -
Basler DECS-100-B15 AVR
-
 Basler D90 96801 100 PCB Card
Basler D90 96801 100 PCB Card -
 Basler XR2002F Voltage Regulator (110 VAC, 48-480 Hz)
Basler XR2002F Voltage Regulator (110 VAC, 48-480 Hz) -
 Basler SR8A-2B14B3A Regulator
Basler SR8A-2B14B3A Regulator -
 Basler 9561500100 Module
Basler 9561500100 Module -
 Basler DECS-400 BE1-11 System
Basler DECS-400 BE1-11 System -
 Basler DECS-100-B15 Excitation Control
Basler DECS-100-B15 Excitation Control -
 Basler SCP 210 Frequency Controller
Basler SCP 210 Frequency Controller -
Basler SR4A-2B15B3A Static Voltage Regulator
-
Basler BE1-32R Power Relay
-
 Basler PIA2400-17GM Power Interface Adapter
Basler PIA2400-17GM Power Interface Adapter -
 Basler MVC 232 Manual Voltage Control Module
Basler MVC 232 Manual Voltage Control Module -
 Basler SSR 32-12 Static Voltage Regulator
Basler SSR 32-12 Static Voltage Regulator -
Basler 5MW AVR Generator Voltage Regulator
-
 Basler VR63-4B Voltage Regulator
Basler VR63-4B Voltage Regulator -
Basler DECS-100-A05 AVR for Engine Generator
-
Basler DECS-100-B15 Automatic Voltage Regulator
-
Basler BE1-32R Directional Power Relay
-
Basler BE1-87B Differential Relay
-
 Basler UFOV 260A Protective Module
Basler UFOV 260A Protective Module -
 Basler 9-2614-02-100 PCB Rev M
Basler 9-2614-02-100 PCB Rev M -
Basler DECS-100-B15 Digital AVR
-
 Basler 9284900103 PS DECS-400N
Basler 9284900103 PS DECS-400N -
 Basler D4N3H1U Intertie Protection
Basler D4N3H1U Intertie Protection -
 Basler DECS-100-B15 A15 AVR
Basler DECS-100-B15 A15 AVR -
 Basler KR4F Voltage Regulator
Basler KR4F Voltage Regulator -
 Basler BE26434 T14 Transformer
Basler BE26434 T14 Transformer -
 Basler SR8A-2B15B3A Regulator
Basler SR8A-2B15B3A Regulator -
 Westinghouse 774B472A12 AR Relay
Westinghouse 774B472A12 AR Relay -
Basler DECS-100-B15 AVR
-
Basler XR2002F Regulator 110V
-
Basler SR125-E Static Regulator
-
Basler SSR 125-12 Regulator
-
Basler MOC2599 Motor Pot
-
 Basler BE1-DFPR Feeder Relay
Basler BE1-DFPR Feeder Relay -
 Basler CBS 305 Current Boost
Basler CBS 305 Current Boost -
Basler BE1-25 AutoSync
-
Basler MVC 300 Voltage Control
-
 Basler BE3-25A AutoSync
Basler BE3-25A AutoSync -
 Basler KR7FF Static Regulator
Basler KR7FF Static Regulator -
Basler 90-49000-100 Regulator
-
 Basler 880 kVA Dry Type Transformer Specs
Basler 880 kVA Dry Type Transformer Specs -
Basler Electric BE1-25 Sync-Check Relay Specs
-
 Basler SSR 125-12 Voltage Regulator Specs
Basler SSR 125-12 Voltage Regulator Specs -
 Basler Electric BE1-851 Overcurrent Relay Review
Basler Electric BE1-851 Overcurrent Relay Review -
Basler Electric 149D930G02 Control Sub-Assembly
-
 Basler Electric BE1-81O/UT Frequency Relay Specs
Basler Electric BE1-81O/UT Frequency Relay Specs -
 Basler Electric BE1-51/27C Overcurrent Relay
Basler Electric BE1-51/27C Overcurrent Relay -
 Basler Electric 149D956G02 Industrial Component
Basler Electric 149D956G02 Industrial Component -
Basler Electric BE1-51A Overcurrent Relay Specs
-
 Basler Electric BE1-40Q Loss of Excitation Relay
Basler Electric BE1-40Q Loss of Excitation Relay -
Basler DECS-200 Excitation Control System
-
 Basler DECS-200 Voltage Regulator 56-277V AC / 125V DC
Basler DECS-200 Voltage Regulator 56-277V AC / 125V DC -
Basler BE1-87T Transformer Differential Relay
-
 Basler RDP-110-S1 Protection Relay
Basler RDP-110-S1 Protection Relay -
 Basler BE1-700V Digital Protective Relay
Basler BE1-700V Digital Protective Relay -
 Basler BE1-951 Overcurrent Protection System
Basler BE1-951 Overcurrent Protection System -
 Basler DECS-300 Digital Excitation Control
Basler DECS-300 Digital Excitation Control -
 Basler DECS-200 Digital Excitation Control
Basler DECS-200 Digital Excitation Control -
 Basler DECS-200-1C Excitation Control System
Basler DECS-200-1C Excitation Control System -
Basler DECS-200-1L Digital Excitation Control
-
 Basler Electric BE1-GPS Generator Protection System
Basler Electric BE1-GPS Generator Protection System -
Basler Electric DECS-200-1C Digital Excitation Controller
-
 Basler Electric DECS125-15 Excitation Control with Power Module
Basler Electric DECS125-15 Excitation Control with Power Module -
Basler Electric BE1-87G Differential Relay
-
 Basler Electric BE1-11 Protection System I5A3M2P2N0EA00
Basler Electric BE1-11 Protection System I5A3M2P2N0EA00 -
Basler Electric DECS-200-1C Excitation Control System
-
Basler Electric BE1-11g Generator Protection Relay
-
Basler Electric DECS 125-15-B2C1 V2.0.9 Excitation Control
-
Basler Electric BE1-81O/UT3ED1JA7N2F Frequency Relay
-
Basler Electric BE1-81O/UT3EE1YB7N1F Frequency Relay
-
 Basler Electric DECS-200-1L Digital Excitation Control System
Basler Electric DECS-200-1L Digital Excitation Control System -
Basler DECS125-15-B2C1 Excitation Control
-
 Basler 9507900205 SSR Retrofit Voltage Regulator
Basler 9507900205 SSR Retrofit Voltage Regulator -
 Basler BE2000E Digital Voltage Regulator
Basler BE2000E Digital Voltage Regulator -
 Basler BE1-GPS Generator Protection System
Basler BE1-GPS Generator Protection System -
Basler DECS-250-CN1CN1N Digital Excitation Control
-
 Basler DGC-2020 Genset Controller
Basler DGC-2020 Genset Controller -
Basler BE1-81O UT3ED1LA7N0F Frequency Relay (Variant)





