
YOKOGAWA WT1801R series precision power analyzer communication interface
Composite instruction: Instrument specific hierarchical instruction, separated by: (e.g. DISPlay: MODE NUMeric to set display mode to numerical display).
Simple instruction: Non hierarchical independent instruction (such as HOLD to set data hold).
Data format: Supports decimal (NR1/NR2/NR3), physical quantities (with units, such as 100V), registers (binary/octal/hexadecimal), strings (user-defined, such as file names), and other formats.
2. Core instruction grouping and functions
Chapter 5 of the document provides a detailed list of 23 instruction groups, covering scenarios such as interface control, display settings, data storage, measurement and calculation. The key instruction groups are as follows:
Instruction group core instruction example function description
COMMunicate Group :COMMunicate:REMote ON
: Communicate: READer OFF controls remote/local mode, sets response with header information
DISPlay Group :DISPlay:MODE WAVE
DISPlay: WAVE: TDIV 5MS Set display mode (waveform/value/trend), adjust waveform timeline scale
FILE Group :FILE:SAVE:NUMeric "DATA1"
: FILE: LOAD: SETup "SET1" saves numerical data to a file, loads instrument settings file
MEASure Group :MEASure:AVERaging:STATE ON
MEASure: FUNCtion1: EXPResolution "URMS (E1)" Enable data averaging function and define user-defined measurement functions
NUMeric Group :NUMeric[:NORMal]:VALue?
NUMeric: FORM ASCII queries numerical measurement data, sets data output format (ASCII/FLOAT)
STORe Group :STORe:START
: STORe: FILE: CONVert: EXECUTE "STR1" Start storing data and convert stored data to CSV format
Common Command *IDN?
*OPC? Query instrument identification (model/serial number), query operation completion status
3. Synchronization and status reporting
Synchronization mechanism: through * WAI (waiting for operation completion),: Communicate: WAIT (waiting for specified event), * OPC? (Operation completion query) Avoid instruction execution conflicts and ensure data consistency.
Status report: includes status bytes, standard event registers, extended event registers, and error queues, supported through: Status: ERRor? Query error codes and messages through * STB? Query status bytes to help locate communication or operational anomalies.
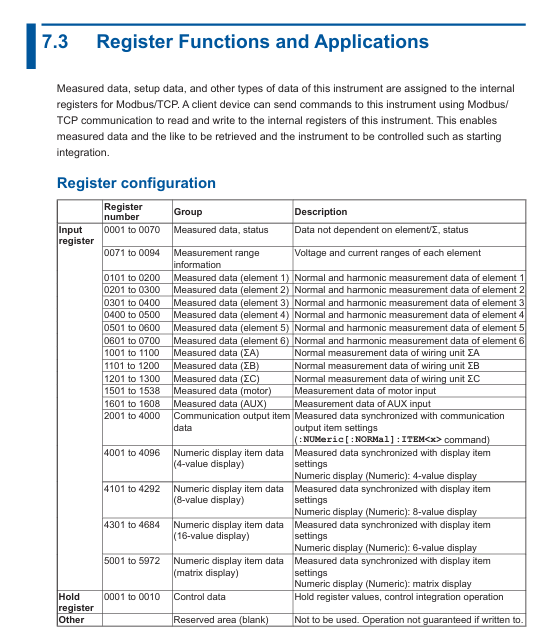
Modbus/TCP communication (extended functionality)
Function Overview: Supports Modbus/TCP protocol, can communicate with client devices (such as PLC, SCADA systems), and achieve register read/write and data interaction.
Register configuration: Chapter 7 of the document provides detailed definitions of register addresses and functions, covering measurement data, instrument status, configuration parameters, etc. It supports reading real-time data such as voltage, current, power, etc. through Modbus commands.
Communication process: The client needs to connect to the instrument's IP address and port (default 502) through TCP, and send Modbus function codes (such as 03H read hold registers) to achieve data exchange.
Precautions and Compatibility
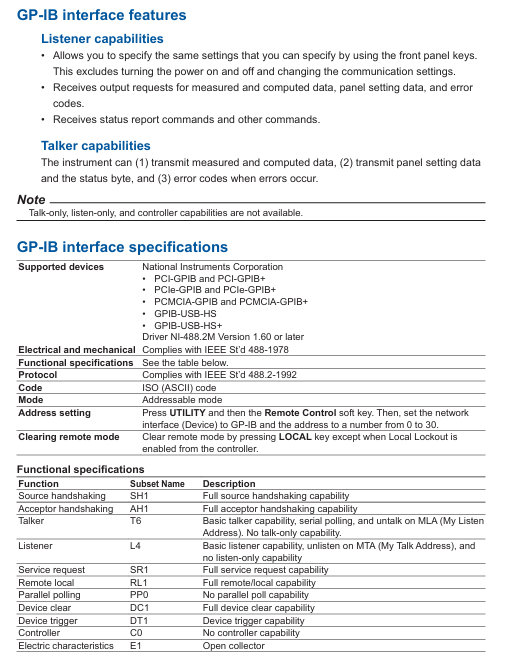
Interface exclusivity: Ethernet, USB, and GP-IB interfaces cannot be used simultaneously and need to be manually switched or specified as a unique active interface through commands to avoid command conflicts.
Driver and library dependencies: USB and Ethernet interfaces require the installation of Yokogawa Communication Library (TMCTL) and drivers, and only support Windows systems, not compatible with third-party drivers.
Cable and Connection: GP-IB requires cables that comply with IEEE standards, Ethernet needs to be connected through a hub/router (cross wiring is not supported), and USB needs to be plugged in and unplugged after the instrument is turned on and stabilized.
Legacy compatibility: Chapter 8 of the document provides instructions for compatibility with WT1600, WT1800, and WT1800E series legacy instruments, facilitating smooth migration for existing users.
- OMRON
- ABB
- General Electric
- EMERSON
- Honeywell
- HIMA
- ALSTOM
- Rolls-Royce
- MOTOROLA
- Rockwell
- Siemens
- Woodward
- YOKOGAWA
- FOXBORO
- KOLLMORGEN
- MOOG
- KB
- YAMAHA
- BENDER
- TEKTRONIX
- Westinghouse
- AMAT
- AB
- XYCOM
- Yaskawa
- B&R
- Schneider
- KONGSBERG
- NI
- WATLOW
- ProSoft
- SEW
- ADVANCED
- Reliance
- TRICONEX
- METSO
- MAN
- Advantest
- STUDER
- DANAHER MOTION
- Bently
- Galil
- EATON
- MOLEX
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- Beijer
- Moxa
- Rexroth
- Johnson
- WAGO
- TOSHIBA
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- Application field
- XP POWER
- CTI
- TRICON
- STOBER
- Thinklogical
- Horner Automation
- Meggitt
- Fanuc
- Baldor
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- Iba
- Beckhoff
-
 Basler D90 96801 100 PCB Card
Basler D90 96801 100 PCB Card -
 Basler XR2002F Voltage Regulator (110 VAC, 48-480 Hz)
Basler XR2002F Voltage Regulator (110 VAC, 48-480 Hz) -
 Basler SR8A-2B14B3A Regulator
Basler SR8A-2B14B3A Regulator -
 Basler 9561500100 Module
Basler 9561500100 Module -
 Basler DECS-400 BE1-11 System
Basler DECS-400 BE1-11 System -
 Basler DECS-100-B15 Excitation Control
Basler DECS-100-B15 Excitation Control -
 Basler SCP 210 Frequency Controller
Basler SCP 210 Frequency Controller -
 Basler SR4A-2B15B3A Static Voltage Regulator
Basler SR4A-2B15B3A Static Voltage Regulator -
 Basler BE1-32R Power Relay
Basler BE1-32R Power Relay -
 Basler PIA2400-17GM Power Interface Adapter
Basler PIA2400-17GM Power Interface Adapter -
 Basler MVC 232 Manual Voltage Control Module
Basler MVC 232 Manual Voltage Control Module -
 Basler SSR 32-12 Static Voltage Regulator
Basler SSR 32-12 Static Voltage Regulator -
 Basler 5MW AVR Generator Voltage Regulator
Basler 5MW AVR Generator Voltage Regulator -
 Basler VR63-4B Voltage Regulator
Basler VR63-4B Voltage Regulator -
 Basler DECS-100-A05 AVR for Engine Generator
Basler DECS-100-A05 AVR for Engine Generator -
 Basler DECS-100-B15 Automatic Voltage Regulator
Basler DECS-100-B15 Automatic Voltage Regulator -
 Basler BE1-32R Directional Power Relay
Basler BE1-32R Directional Power Relay -
 Basler BE1-87B Differential Relay
Basler BE1-87B Differential Relay -
 Basler UFOV 260A Protective Module
Basler UFOV 260A Protective Module -
 Basler 9-2614-02-100 PCB Rev M
Basler 9-2614-02-100 PCB Rev M -
Basler DECS-100-B15 Digital AVR
-
 Basler 9284900103 PS DECS-400N
Basler 9284900103 PS DECS-400N -
 Basler D4N3H1U Intertie Protection
Basler D4N3H1U Intertie Protection -
 Basler DECS-100-B15 A15 AVR
Basler DECS-100-B15 A15 AVR -
 Basler KR4F Voltage Regulator
Basler KR4F Voltage Regulator -
 Basler BE26434 T14 Transformer
Basler BE26434 T14 Transformer -
 Basler SR8A-2B15B3A Regulator
Basler SR8A-2B15B3A Regulator -
 Westinghouse 774B472A12 AR Relay
Westinghouse 774B472A12 AR Relay -
Basler DECS-100-B15 AVR
-
Basler XR2002F Regulator 110V
-
Basler SR125-E Static Regulator
-
 Basler SSR 125-12 Regulator
Basler SSR 125-12 Regulator -
 Basler MOC2599 Motor Pot
Basler MOC2599 Motor Pot -
 Basler BE1-DFPR Feeder Relay
Basler BE1-DFPR Feeder Relay -
 Basler CBS 305 Current Boost
Basler CBS 305 Current Boost -
 Basler BE1-25 AutoSync
Basler BE1-25 AutoSync -
 Basler MVC 300 Voltage Control
Basler MVC 300 Voltage Control -
 Basler BE3-25A AutoSync
Basler BE3-25A AutoSync -
 Basler KR7FF Static Regulator
Basler KR7FF Static Regulator -
 Basler 90-49000-100 Regulator
Basler 90-49000-100 Regulator -
 Basler 880 kVA Dry Type Transformer Specs
Basler 880 kVA Dry Type Transformer Specs -
 Basler Electric BE1-25 Sync-Check Relay Specs
Basler Electric BE1-25 Sync-Check Relay Specs -
 Basler SSR 125-12 Voltage Regulator Specs
Basler SSR 125-12 Voltage Regulator Specs -
 Basler Electric BE1-851 Overcurrent Relay Review
Basler Electric BE1-851 Overcurrent Relay Review -
Basler Electric 149D930G02 Control Sub-Assembly
-
 Basler Electric BE1-81O/UT Frequency Relay Specs
Basler Electric BE1-81O/UT Frequency Relay Specs -
 Basler Electric BE1-51/27C Overcurrent Relay
Basler Electric BE1-51/27C Overcurrent Relay -
 Basler Electric 149D956G02 Industrial Component
Basler Electric 149D956G02 Industrial Component -
Basler Electric BE1-51A Overcurrent Relay Specs
-
 Basler Electric BE1-40Q Loss of Excitation Relay
Basler Electric BE1-40Q Loss of Excitation Relay -
 Basler DECS-200 Excitation Control System
Basler DECS-200 Excitation Control System -
 Basler DECS-200 Voltage Regulator 56-277V AC / 125V DC
Basler DECS-200 Voltage Regulator 56-277V AC / 125V DC -
Basler BE1-87T Transformer Differential Relay
-
 Basler RDP-110-S1 Protection Relay
Basler RDP-110-S1 Protection Relay -
 Basler BE1-700V Digital Protective Relay
Basler BE1-700V Digital Protective Relay -
 Basler BE1-951 Overcurrent Protection System
Basler BE1-951 Overcurrent Protection System -
 Basler DECS-300 Digital Excitation Control
Basler DECS-300 Digital Excitation Control -
 Basler DECS-200 Digital Excitation Control
Basler DECS-200 Digital Excitation Control -
 Basler DECS-200-1C Excitation Control System
Basler DECS-200-1C Excitation Control System -
Basler DECS-200-1L Digital Excitation Control
-
 Basler Electric BE1-GPS Generator Protection System
Basler Electric BE1-GPS Generator Protection System -
Basler Electric DECS-200-1C Digital Excitation Controller
-
 Basler Electric DECS125-15 Excitation Control with Power Module
Basler Electric DECS125-15 Excitation Control with Power Module -
 Basler Electric BE1-87G Differential Relay
Basler Electric BE1-87G Differential Relay -
 Basler Electric BE1-11 Protection System I5A3M2P2N0EA00
Basler Electric BE1-11 Protection System I5A3M2P2N0EA00 -
Basler Electric DECS-200-1C Excitation Control System
-
Basler Electric BE1-11g Generator Protection Relay
-
Basler Electric DECS 125-15-B2C1 V2.0.9 Excitation Control
-
 Basler Electric BE1-81O/UT3ED1JA7N2F Frequency Relay
Basler Electric BE1-81O/UT3ED1JA7N2F Frequency Relay -
Basler Electric BE1-81O/UT3EE1YB7N1F Frequency Relay
-
 Basler Electric DECS-200-1L Digital Excitation Control System
Basler Electric DECS-200-1L Digital Excitation Control System -
Basler DECS125-15-B2C1 Excitation Control
-
 Basler 9507900205 SSR Retrofit Voltage Regulator
Basler 9507900205 SSR Retrofit Voltage Regulator -
 Basler BE2000E Digital Voltage Regulator
Basler BE2000E Digital Voltage Regulator -
 Basler BE1-GPS Generator Protection System
Basler BE1-GPS Generator Protection System -
Basler DECS-250-CN1CN1N Digital Excitation Control
-
 Basler DGC-2020 Genset Controller
Basler DGC-2020 Genset Controller -
 Basler BE1-81O UT3ED1LA7N0F Frequency Relay (Variant)
Basler BE1-81O UT3ED1LA7N0F Frequency Relay (Variant) -
 Basler BE1-81O UT3EE1YA9S0F Frequency Relay (Variant)
Basler BE1-81O UT3EE1YA9S0F Frequency Relay (Variant) -
Basler BE1-81O Over/Under Frequency Relay
-
Basler DECS125-15 Digital Excitation Control
-
Basler Electric BE1-951 Overcurrent Protection System
-
 Basler Electric BE1-700V Digital Protective Relay
Basler Electric BE1-700V Digital Protective Relay -
 Basler Electric APR63-5 Automatic Voltage Regulator
Basler Electric APR63-5 Automatic Voltage Regulator -
Basler Electric BE1-851 Overcurrent Protection System
-
Basler Electric DECS-250-LN1SN1N Excitation Control
-
 Basler Electric BE1-87T Transformer Differential Relay
Basler Electric BE1-87T Transformer Differential Relay -
Basler Electric DECS-200-1L Excitation Control System
-
 Basler Electric 9310300100 DECS-300 Excitation Control
Basler Electric 9310300100 DECS-300 Excitation Control -
 Basler Electric SSE-N 125-4.5KW Shunt Exciter Regulator
Basler Electric SSE-N 125-4.5KW Shunt Exciter Regulator -
 Basler Electric DGC-2020HD-5NS1DNSBA Genset Controller
Basler Electric DGC-2020HD-5NS1DNSBA Genset Controller -
Basler Electric BE1-81-O/UT3EE1JB7N1F Frequency Relay
-
Basler Electric BE1-81T1EE1WA0N1F Frequency Relay
-
 Basler Electric BE1-25M1EA6PN5R1F Sync-Check Relay
Basler Electric BE1-25M1EA6PN5R1F Sync-Check Relay -
 Basler Electric BE1-GPS Generator Protection System
Basler Electric BE1-GPS Generator Protection System -
Basler Electric DECS-250-LN1SN1N Excitation Control Rev V
-
 Basler Electric DECS-250-CN2CN1N Excitation Control
Basler Electric DECS-250-CN2CN1N Excitation Control -
Basler Electric BE1-50/51B-207 Overcurrent Relay
-
Basler Electric DECS-300-C0N0 Excitation Control System
-
Basler Electric DECS-200 Digital Excitation Control System
-
Basler Electric DECS-250-LN1CN1N Excitation Unit
-
Basler Electric DECS-250 LN2SA1D Excitation Unit Specs
-
Basler Electric BE1-87T Transformer Relay Review
-
Basler Electric BE1-11 Protection System
-
Basler Electric BE1-GPS100-E4N1H1N Protection System
-
 Allen-Bradley 442G-MABH-R Safety Module
Allen-Bradley 442G-MABH-R Safety Module -
 Beckhoff CX1030-0111 PLC Assembly Profile
Beckhoff CX1030-0111 PLC Assembly Profile -
 FANUC IC693CPU364 PLC Module
FANUC IC693CPU364 PLC Module -
 Orange Denmark Type 200816 220 PLC Specs
Orange Denmark Type 200816 220 PLC Specs -
 OMRON C200H-SNT31 Sysmac PLC Module
OMRON C200H-SNT31 Sysmac PLC Module -
 Allen Bradley 20AB022A3AYNANC0 PowerFlex 70
Allen Bradley 20AB022A3AYNANC0 PowerFlex 70 -
 OMRON C200HW-PCU01 Position Control Unit
OMRON C200HW-PCU01 Position Control Unit -
 ABB AO845A-eA Analog Output Module
ABB AO845A-eA Analog Output Module -
 OMRON CJ1M-CPU22 CPU Unit
OMRON CJ1M-CPU22 CPU Unit -
 Allen Bradley 100-E265ED11 Contactor
Allen Bradley 100-E265ED11 Contactor -
 Honeywell 51304511-100 Interface Module
Honeywell 51304511-100 Interface Module -
 SOLEXY BXF3S0101N0018 Gateway Module
SOLEXY BXF3S0101N0018 Gateway Module -
 OMRON CJ2H-CPU65 CPU Unit
OMRON CJ2H-CPU65 CPU Unit -
 Automation Direct GS2-45P0 AC Drive
Automation Direct GS2-45P0 AC Drive -
 M68-2000 2-Axis Motion CNC Controller
M68-2000 2-Axis Motion CNC Controller -
 OMRON CJ1M-CPU11 V3.0 PLC CPU Unit
OMRON CJ1M-CPU11 V3.0 PLC CPU Unit -
 OMRON CJ1W-NC413 4-Axis Positioning Controller
OMRON CJ1W-NC413 4-Axis Positioning Controller -
 OMRON 3G2A3-PRO16 Programming Console HMI
OMRON 3G2A3-PRO16 Programming Console HMI -
 Siemens 3VT8440-2AA04-2GA2 Molded Case Circuit Breaker
Siemens 3VT8440-2AA04-2GA2 Molded Case Circuit Breaker -
 Siemens 3RT5045 Contactor Series
Siemens 3RT5045 Contactor Series -
 OMRON C200HS-CPU01-E SYSMAC PLC Controller
OMRON C200HS-CPU01-E SYSMAC PLC Controller -
 OMRON C500-NC103-E Positioning Control Unit
OMRON C500-NC103-E Positioning Control Unit -
 OMRON CJ1W-TC001 Temperature Control Unit
OMRON CJ1W-TC001 Temperature Control Unit





