
From Beginner to Proficient: Woodward easyYgen-3000 Controller Interface Configuration, CANopen, J1939 and Modbus Communication Practical Guide
From Beginner to Proficient: Woodward easyYgen-3000 Controller Interface Configuration, CANopen, J1939 and Modbus Communication Practical Guide
Introduction
The Woodward easyYgen-3000 series generator set controller is an advanced equipment in the field of industrial power generation and control, widely used in backup power, main power, and parallel power generation systems. This manual (No. 37472A) provides a detailed introduction to the interface functions of the controller, including CAN bus configuration, Modbus communication protocol, and the implementation of various data protocols. This article will comprehensively analyze the interface architecture, configuration methods, remote control functions, and troubleshooting strategies of easyYgen-3000, aiming to provide users with a practical and systematic operation guide.
Product Overview and Safety Notice
1.1 Product Introduction
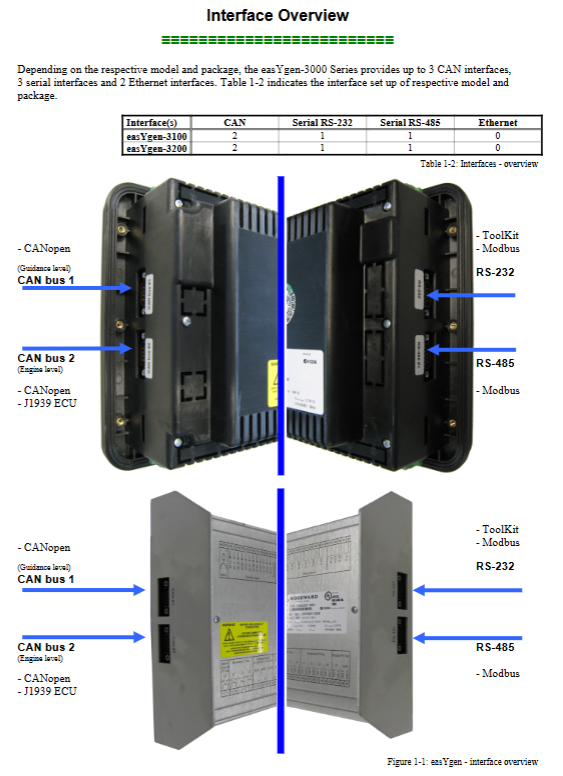
The easyYgen-3000 series controller supports multiple models (such as 3100, 3200) and provides rich interface options, including:
CAN interface: up to 3, supporting CANopen and J1939 protocols
Serial interface: up to 3 (RS-232 and RS-485)
Ethernet interface: up to 2 (some models)
The controller software version is 1.15xx and supports multiple component numbers (such as 8440-1922 to 8440-1933), suitable for different configurations of generator control systems.
1.2 Safety Warning and Precautions
Before using the device, it is necessary to carefully read and comply with the following safety regulations:
Warning: Before installing, operating, or maintaining the equipment, please read all relevant manuals thoroughly. Failure to follow the instructions may result in personal injury or property damage.
Overspeed protection: The prime mover must be equipped with an overspeed (over temperature, over pressure) shutdown device independent of the controller.
Anti static measures: The controller contains static sensitive components. Before operation, please release body static electricity and avoid touching components on the circuit board.
Battery disconnection: Before disconnecting the battery, please turn off the charging device to prevent damage to the control system.
Overview of Interface Architecture and Functionality
2.1 CAN interface
CAN interfaces are divided into two categories:
CAN Interface 1: A freely configurable CANopen interface that supports 5 RPDOs (receiving process data objects) and 5 TPDOs (sending process data objects), suitable for upper layer control (such as PLC) and load sharing.
CAN interface 2 (engine bus): Supports both CANopen and J1939 protocols, used to connect the engine control unit (ECU) and extended I/O modules.
2.2 Serial interface
Serial Interface 1 (RS-232): Used for local services, configuration, and data visualization, supporting ServLink and Modbus protocols.
Serial Interface 2 (RS-485): Supports Modbus RTU slave protocol, suitable for PLC connection and multi device communication.
2.3 Ethernet interface
Some models offer Ethernet interfaces, supporting faster data transmission and remote access capabilities.
Detailed explanation of CAN bus configuration
3.1 CAN bus diagnosis
The controller provides CAN bus load and status diagnostic functions:
Load diagnosis: Monitor the total load of the CAN bus and the sub loads of CANopen and J1939. It is recommended that the load not exceed 100%.
Status diagnosis: Display real-time status of CAN interface to help quickly locate communication faults.
3.2 CAN interface parameter configuration
The parameter configuration of CAN interface 1 and CAN interface 2 includes baud rate, node ID, PDO mapping, etc. For example:
Baud rate: can be set to 20 to 1000 kBd
Node ID: Range from 1 to 127
PDO Mapping: Supports up to 4 mapping objects, with each object corresponding to a parameter ID
3.3 Load sharing function
EasyYgen-3000 supports up to 32 devices to participate in load sharing, adopting a multi master principle without the need for a dedicated master controller. When configuring load sharing, attention should be paid to:
Parameter alignment: The parameters of all participating devices must be consistent
Member monitoring: The system monitors whether all participating devices are online
Bus load optimization: can reduce load by increasing baud rate, reducing data transmission frequency, and other methods
J1939 protocol support
4.1 Supported ECU Types
The controller is compatible with multiple engine control units, including:
Scania S6
Deutz EMR2
Volvo EMS2
MTU ADEC
Woodward EGS
wait
4.2 Data Display and Remote Control
Through the J1939 protocol, the controller can display real-time data of the engine (such as speed, oil pressure, water temperature, etc.) and support remote control functions (such as start stop, idle mode, speed bias, etc.).
Modbus communication configuration
5.1 Address Range and Data Access
The Modbus interface is divided into two address ranges:
Visual data: Starting address 450001, supports block reading (up to 128 registers)
Configuration and remote control data: starting address 40001, supports read and write operations
5.2 Remote control function
Through Modbus, users can perform the following remote operations:
Start stop control: remote start, stop, and confirmation are achieved through bit operations of parameter 503
- OMRON
- ABB
- General Electric
- EMERSON
- Honeywell
- HIMA
- ALSTOM
- Rolls-Royce
- MOTOROLA
- Rockwell
- Siemens
- Woodward
- YOKOGAWA
- FOXBORO
- KOLLMORGEN
- MOOG
- KB
- YAMAHA
- BENDER
- TEKTRONIX
- Westinghouse
- AMAT
- AB
- XYCOM
- Yaskawa
- B&R
- Schneider
- KONGSBERG
- NI
- WATLOW
- ProSoft
- SEW
- ADVANCED
- Reliance
- TRICONEX
- METSO
- MAN
- Advantest
- STUDER
- DANAHER MOTION
- Bently
- Galil
- EATON
- MOLEX
- DEIF
- B&W
- ZYGO
- Aerotech
- DANFOSS
- Beijer
- Moxa
- Rexroth
- Johnson
- WAGO
- TOSHIBA
- BMCM
- SMC
- HITACHI
- HIRSCHMANN
- Application field
- XP POWER
- CTI
- TRICON
- STOBER
- Thinklogical
- Horner Automation
- Meggitt
- Fanuc
- Baldor
- SHINKAWA
- Other Brands
- UniOP
- KUKA
- Iba
- Beckhoff
- ADLINK
-
 Basler Electric BE1-700 Digital Protective Relay
Basler Electric BE1-700 Digital Protective Relay -
 Basler Electric SR8A-2B01B3A Static Voltage Regulator
Basler Electric SR8A-2B01B3A Static Voltage Regulator -
 Basler Electric SR4A-2B01B3E Static Voltage Regulator
Basler Electric SR4A-2B01B3E Static Voltage Regulator -
 Basler Electric 9017709102 PC Board
Basler Electric 9017709102 PC Board -
Basler Electric SR4A-2B01B3A Static Voltage Regulator
-
 Basler Electric PRS-250 Veri-Sync Relay
Basler Electric PRS-250 Veri-Sync Relay -
 Basler Electric 9066800102 Excitation Support System
Basler Electric 9066800102 Excitation Support System -
 Basler Electric BE1-87G Generator Differential Relay 9 1708 18 100
Basler Electric BE1-87G Generator Differential Relay 9 1708 18 100 -
 Basler Electric 36T865-2 BE03752001 Power Supply
Basler Electric 36T865-2 BE03752001 Power Supply -
 Basler Electric M-300 149D940G02 Power Supply
Basler Electric M-300 149D940G02 Power Supply -
 Basler Electric ACA2040-25GM 4Mp 25Fps Area Scan Camera
Basler Electric ACA2040-25GM 4Mp 25Fps Area Scan Camera -
 Basler BE1-87G-S1A-A1C-A0N0 Differential Relay
Basler BE1-87G-S1A-A1C-A0N0 Differential Relay -
 Basler SR8A-2B06B3E Static Regulator SR8A2B06B3E
Basler SR8A-2B06B3E Static Regulator SR8A2B06B3E -
 Basler SCP-210 Frequency Controller 9095400100
Basler SCP-210 Frequency Controller 9095400100 -
 Basler BE1-59-A3E-A1J-N1N3F Overvoltage Relay BE159A3EA1JN1N3F
Basler BE1-59-A3E-A1J-N1N3F Overvoltage Relay BE159A3EA1JN1N3F -
 Basler 9 2011 11 100 Bracket Mounted Terminal Unit
Basler 9 2011 11 100 Bracket Mounted Terminal Unit -
Basler 9 1606 00 101 Voltage Regulator
-
 Basler CBS-377 Current Boost System 9109600102
Basler CBS-377 Current Boost System 9109600102 -
 Basler 8650C72 Exciter Control Module PCB Rev 5
Basler 8650C72 Exciter Control Module PCB Rev 5 -
 Basler C2EE1PA0N1F BE1-32R Reverse Power Relay
Basler C2EE1PA0N1F BE1-32R Reverse Power Relay -
 ADLINK HPCI-14S12U - Industrial Control Backplane 12PCI Backplane PCI-14S Passive Backplane
ADLINK HPCI-14S12U - Industrial Control Backplane 12PCI Backplane PCI-14S Passive Backplane -
-0010.png) ADLINK PCIe-GIE74C - image acquisition card 4-CH GigE Vision PoE+ Frame Grabber
ADLINK PCIe-GIE74C - image acquisition card 4-CH GigE Vision PoE+ Frame Grabber -
-0010_1.png) ADLINK PCI-8164 - control card 4-Axis Advanced Motion Controller Board
ADLINK PCI-8164 - control card 4-Axis Advanced Motion Controller Board -
 ADLINK PCIe-U304 - 4 Port USB3 PCIe Frame Grabbers USB Screw Hole Card
ADLINK PCIe-U304 - 4 Port USB3 PCIe Frame Grabbers USB Screw Hole Card -
 ADLINK PCI-9112 - Multi-Function Data Acquisition Card DAQ Card
ADLINK PCI-9112 - Multi-Function Data Acquisition Card DAQ Card -
 ADLINK PCI-7432 - 51-12013-0A50 4-CH Isolated Numérique I/O PCI Cartes Digital I/O Card
ADLINK PCI-7432 - 51-12013-0A50 4-CH Isolated Numérique I/O PCI Cartes Digital I/O Card -
 ADLINK PCA-6106P3-0C1 REV.C1 - backplane 6-Slot Passive Backplane Board
ADLINK PCA-6106P3-0C1 REV.C1 - backplane 6-Slot Passive Backplane Board -
 ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Board
ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Board -
 ADLINK CPCI-7433R(G) - Digital Input Board Rear I/O CompactPCI Card
ADLINK CPCI-7433R(G) - Digital Input Board Rear I/O CompactPCI Card -
 ADLINK EBP-13E4 - 51-46703-0A30 Industrial PC Backplane Passive Backplane
ADLINK EBP-13E4 - 51-46703-0A30 Industrial PC Backplane Passive Backplane -
 ADLINK PCIE-HDV62 - Image acquisition card High Definition Video Frame Grabber
ADLINK PCIE-HDV62 - Image acquisition card High Definition Video Frame Grabber -
 ADLINK EBP-13E4 - 51-46703-0A30 Industrial Backplane Board Passive Backplane
ADLINK EBP-13E4 - 51-46703-0A30 Industrial Backplane Board Passive Backplane -
 ADLINK 90111-B1 / CPCI-6770 - PCB CPU MODULE CompactPCI Single Board Computer
ADLINK 90111-B1 / CPCI-6770 - PCB CPU MODULE CompactPCI Single Board Computer -
 ADLINK PCI-7248 - DATA ACQUISITION PCI CARD 48-CH Parallel Digital I/O Board
ADLINK PCI-7248 - DATA ACQUISITION PCI CARD 48-CH Parallel Digital I/O Board -
 ADLINK PCI-7230 - 51-12003-0a50 board PCI7230 32-CH Isolated Digital I/O Card
ADLINK PCI-7230 - 51-12003-0a50 board PCI7230 32-CH Isolated Digital I/O Card -
 ADLINK PCI2A000CB - 51-20000-0B30 Multi-Function DAQ Card Baseboard
ADLINK PCI2A000CB - 51-20000-0B30 Multi-Function DAQ Card Baseboard -
 ADLINK PCI-8134-005 - 4-Axis Motion Controller Card
ADLINK PCI-8134-005 - 4-Axis Motion Controller Card -
 ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Card
ADLINK PCI-7224 - 24-CH Opto-Isolated Digital I/O PCI Card -
 ADLINK PCI-7434 - 64-CH Isolated Digital Output Card
ADLINK PCI-7434 - 64-CH Isolated Digital Output Card -
 ADLINK PCI-8132 - motion control card 2-Axis Servo & Stepper Controller
ADLINK PCI-8132 - motion control card 2-Axis Servo & Stepper Controller -
 ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board
ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board -
 ADLINK PCI-8164 - Motion Control Card 51-12406-0A40 4-Axis Controller
ADLINK PCI-8164 - Motion Control Card 51-12406-0A40 4-Axis Controller -
 ADLINK 51-12001-0C20 - Circuit Board Data Acquisition Interface Module Hardware
ADLINK 51-12001-0C20 - Circuit Board Data Acquisition Interface Module Hardware -
 ADLINK NuPR0-840 - industrial control motherboard Full-Size PICMG CPU Board
ADLINK NuPR0-840 - industrial control motherboard Full-Size PICMG CPU Board -
 ADLINK PCI-7444 - 51-12023-0A10 card 128-CH Isolated Digital Output Board
ADLINK PCI-7444 - 51-12023-0A10 card 128-CH Isolated Digital Output Board -
 ADLINK PCI-1612B - data acquisition card 4-Port RS-232/422/485 Serial Communication Card
ADLINK PCI-1612B - data acquisition card 4-Port RS-232/422/485 Serial Communication Card -
 ADLINK PCI-6208V 009 - 8/16-CH 16-Bit Analog Output Cards PCB-I-E-482=6BX3
ADLINK PCI-6208V 009 - 8/16-CH 16-Bit Analog Output Cards PCB-I-E-482=6BX3 -
 ADLINK NUPRO-935A/LV - industrial control motherboard Full-Size PICMG SBC Board
ADLINK NUPRO-935A/LV - industrial control motherboard Full-Size PICMG SBC Board -
 ADLINK PCI-9114DG - Multi-Function DAQ Card Data Acquisition PCI Card
ADLINK PCI-9114DG - Multi-Function DAQ Card Data Acquisition PCI Card -
 ADLINK ACL-7130 - Data acquisition card Isolated Digital I/O Board
ADLINK ACL-7130 - Data acquisition card Isolated Digital I/O Board -
 ADLINK ABX-6300D-4E1-BP - board ABX6300D4E1BP Video Interface Expansion Card
ADLINK ABX-6300D-4E1-BP - board ABX6300D4E1BP Video Interface Expansion Card -
 ADLINK CPCI-6940 - CPCI-6940/D1539/M16-0(EA)-000E 6U CompactPCI Processor Board
ADLINK CPCI-6940 - CPCI-6940/D1539/M16-0(EA)-000E 6U CompactPCI Processor Board -
 ADLINK NuPRO-760 - industrial control motherboard Half-Size PICMG SBC CPU Board
ADLINK NuPRO-760 - industrial control motherboard Half-Size PICMG SBC CPU Board -
 ADLINK IMB-M42H (G)-0020 - industrial control motherboard LGA1155 Micro-ATX Mainboard
ADLINK IMB-M42H (G)-0020 - industrial control motherboard LGA1155 Micro-ATX Mainboard -
 ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board
ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board -
 ADLINK PCI-8134 - 4-Axis Servo & Stepper Motion Controller Card
ADLINK PCI-8134 - 4-Axis Servo & Stepper Motion Controller Card -
 ADLINK MXC-6101D - V.PC000.002.ST.00 Box PC Configurable Embedded Computer
ADLINK MXC-6101D - V.PC000.002.ST.00 Box PC Configurable Embedded Computer -
.png) ADLINK PCI-8134A - 51-12421-0A10 Motion Control Card 4-Axis Controller Card
ADLINK PCI-8134A - 51-12421-0A10 Motion Control Card 4-Axis Controller Card -
 ADLINK DIN-100S / DIN-100SA1 - Technology SCSI-II TB 100-PIN Terminal Block Board
ADLINK DIN-100S / DIN-100SA1 - Technology SCSI-II TB 100-PIN Terminal Block Board -
.png) ADLINK DIN-812M001 / DIN812M001 - 51-14034-0A1 51140340A1 Terminal Module Breakout Interface
ADLINK DIN-812M001 / DIN812M001 - 51-14034-0A1 51140340A1 Terminal Module Breakout Interface -
_1.png) ADLINK PCI-8164 - Servo motion control 4-Axis Advanced Controller Card
ADLINK PCI-8164 - Servo motion control 4-Axis Advanced Controller Card -
 ADLINK PCIe-GIE64 - Acquisition card GigE Vision PoE+ Frame Grabber
ADLINK PCIe-GIE64 - Acquisition card GigE Vision PoE+ Frame Grabber -
 ADLINK M-302 - Industrial control motherboard ATX PC Board Mainboard
ADLINK M-302 - Industrial control motherboard ATX PC Board Mainboard -
 ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board
ADLINK PCI-8134 - Motion Controller PCI Card 4-Axis Controller Board -
 ADLINK PCI-RTV24 - Image capture card Analog Video Frame Grabber
ADLINK PCI-RTV24 - Image capture card Analog Video Frame Grabber -
 ADLINK PCI-8102 - Motion control card 2-Axis Servo & Stepper Controller Board
ADLINK PCI-8102 - Motion control card 2-Axis Servo & Stepper Controller Board -
 ADLINK PCI-9112 REV.B1 - Card Multi-Function Data Acquisition Card
ADLINK PCI-9112 REV.B1 - Card Multi-Function Data Acquisition Card -
 ADLINK HSI-DI32-M-N / HSL-TB32-M-DIN - Discrete I/O MODULE Distributed Automation Module System
ADLINK HSI-DI32-M-N / HSL-TB32-M-DIN - Discrete I/O MODULE Distributed Automation Module System -
 ADLINK PCI-7296 - IO card REV.A3 96-CH Parallel Digital I/O Card
ADLINK PCI-7296 - IO card REV.A3 96-CH Parallel Digital I/O Card -
-0020.png) ADLINK DIN-814P-A4 / 814Y - terminal board Motion Control Interface Block
ADLINK DIN-814P-A4 / 814Y - terminal board Motion Control Interface Block -
 ADLINK DIN-814P-A4 - 51-14056-0A10 PCB-I-E-2736=ZA01 Screw Terminal Board Breakout
ADLINK DIN-814P-A4 - 51-14056-0A10 PCB-I-E-2736=ZA01 Screw Terminal Board Breakout -
 ADLINK M-322 - motherboard Industrial Control Computer Mainboard
ADLINK M-322 - motherboard Industrial Control Computer Mainboard -
 ADLINK NUPRO-406 REV:B1 - industrial control motherboard Full-Size PICMG CPU Board
ADLINK NUPRO-406 REV:B1 - industrial control motherboard Full-Size PICMG CPU Board -
 ADLINK AMP-204C - card DSP-Based 4-Axis Advanced Pulse-Train Controller
ADLINK AMP-204C - card DSP-Based 4-Axis Advanced Pulse-Train Controller -
 ADLINK HPCI14S REV.B1 - industrial computer baseboard 14-Slot Passive Backplane
ADLINK HPCI14S REV.B1 - industrial computer baseboard 14-Slot Passive Backplane -
 ADLINK PCI-7250 - 8-CH Relay Output & 8-CH Isolated DI PCI Card
ADLINK PCI-7250 - 8-CH Relay Output & 8-CH Isolated DI PCI Card -
 ADLINK EBP-13E2 - baseplate Passive Backplane Industrial Computer Chassis Board
ADLINK EBP-13E2 - baseplate Passive Backplane Industrial Computer Chassis Board -
 ADLINK LPCI-3488A - PCI-GPIB card 51-12801-0A30 acquisition card IEEE-488 Interface Board
ADLINK LPCI-3488A - PCI-GPIB card 51-12801-0A30 acquisition card IEEE-488 Interface Board -
 ADLINK PCI-6216V-GL - 51-12201-0C30 16-CH 16-Bit Voltage Analog Output Card
ADLINK PCI-6216V-GL - 51-12201-0C30 16-CH 16-Bit Voltage Analog Output Card -
 ADLINK ACL-8454 - 16-CH Isolated Digital I/O & 4-CH Counter Card
ADLINK ACL-8454 - 16-CH Isolated Digital I/O & 4-CH Counter Card -
 ADLINK HPCI-9S7U - backplane Passive Backplane Compatible with NuPRO-A301 852 841 842
ADLINK HPCI-9S7U - backplane Passive Backplane Compatible with NuPRO-A301 852 841 842 -
 ADLINK DAQ-2010-007 - Simultaneous-Sampling Multi-Function Data Acquisition Card
ADLINK DAQ-2010-007 - Simultaneous-Sampling Multi-Function Data Acquisition Card -
 ADLINK MP-C154 - 51-64205-0A10 Motion Control Card 4-Axis Controller Board
ADLINK MP-C154 - 51-64205-0A10 Motion Control Card 4-Axis Controller Board -
 ADLINK MXE-202/mSSD16B/WiFi-BT - Matrix Rugged I/O Platform Embedded Fanless Computer
ADLINK MXE-202/mSSD16B/WiFi-BT - Matrix Rugged I/O Platform Embedded Fanless Computer -
 ADLINK CM-920-R-17 - PC/104-Plus Single Board Computer Module Intel Celeron M
ADLINK CM-920-R-17 - PC/104-Plus Single Board Computer Module Intel Celeron M -
 ADLINK PCI-7250 NSMP - 8-CH Relay Output & 8-CH Isolated DI Card
ADLINK PCI-7250 NSMP - 8-CH Relay Output & 8-CH Isolated DI Card -
 ADLINK PCI-8164 - 4-Axis Motion Controller PCI Card W/ Cable and Breakout Box
ADLINK PCI-8164 - 4-Axis Motion Controller PCI Card W/ Cable and Breakout Box -
 ADLINK EMX-100 - Ethernet-based 4-axis Motion Controllers Distributed Motion Module
ADLINK EMX-100 - Ethernet-based 4-axis Motion Controllers Distributed Motion Module -
.png) ADLINK PCI-8134A - Press control card 4-Axis Motion Controller Board
ADLINK PCI-8134A - Press control card 4-Axis Motion Controller Board -
 ADLINK M-845EG REV:3.2 - industrial motherboard Pentium 4 Socket 478 Micro-ATX
ADLINK M-845EG REV:3.2 - industrial motherboard Pentium 4 Socket 478 Micro-ATX -
 ADLINK PCI-9114A Rev A2 DG - card High-Resolution Multi-Function Data Acquisition Board
ADLINK PCI-9114A Rev A2 DG - card High-Resolution Multi-Function Data Acquisition Board -
 ADLINK IEC-915GV - REV 1.1 Industrial motherboard Socket 478 CPU Board
ADLINK IEC-915GV - REV 1.1 Industrial motherboard Socket 478 CPU Board -
 ADLINK PCI-9111DG(G) - Data Acquisition Card Multi-Function DAQ Card
ADLINK PCI-9111DG(G) - Data Acquisition Card Multi-Function DAQ Card -
 ADLINK HPCI-15S10 REV:B2 - Industrial computer base plate Passive Backplane Board
ADLINK HPCI-15S10 REV:B2 - Industrial computer base plate Passive Backplane Board -
 ADLINK NuPR0-840 / NuPR0-840DV - industrial control motherboard Full-size PICMG CPU Board
ADLINK NuPR0-840 / NuPR0-840DV - industrial control motherboard Full-size PICMG CPU Board -
 ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board
ADLINK RTV-24 / PCI-MP4S - 51-12519-1C30 4-Channel Real Time Video Capture Board -
 ADLINK NUPRO-780 - industrial control motherboard Pentium III Single Board Computer
ADLINK NUPRO-780 - industrial control motherboard Pentium III Single Board Computer -
 ADLINK PCI-7296 - 0050 card 96-CH Opto-Isolated Parallel DIO Card Set
ADLINK PCI-7296 - 0050 card 96-CH Opto-Isolated Parallel DIO Card Set -
-0040.png) ADLINK NUPRO-780 - industrial control motherboard PICMG Full-Size SBC
ADLINK NUPRO-780 - industrial control motherboard PICMG Full-Size SBC -
 ADLINK PCI-7248 - 51-12006-0A3 002 Pci 7248 48-CH Parallel Digital I/O Card
ADLINK PCI-7248 - 51-12006-0A3 002 Pci 7248 48-CH Parallel Digital I/O Card -
 ADLINK PCI-7230 - 32-CH Isolated Digital I/O Card
ADLINK PCI-7230 - 32-CH Isolated Digital I/O Card -
 ADLINK AMP-204C - motion control card 4-Axis Advanced Controller Board
ADLINK AMP-204C - motion control card 4-Axis Advanced Controller Board -
.png) ADLINK PCI-1714UL - Card Ultra High-Speed 4-CH Simultaneous Sampling DAQ
ADLINK PCI-1714UL - Card Ultra High-Speed 4-CH Simultaneous Sampling DAQ -
 ADLINK NuPRO-E330 - industrial computer equipment motherboard PICMG 1.3 SHB SBC
ADLINK NuPRO-E330 - industrial computer equipment motherboard PICMG 1.3 SHB SBC -
 ADLINK AMP-204C - DSP-Based 4-Axis Advanced Pulse-Train Motion Controller Module
ADLINK AMP-204C - DSP-Based 4-Axis Advanced Pulse-Train Motion Controller Module -
 ADLINK PCI-7256 - 001 51-12206-0A2 REV.A2 LPCI-7256 16-CH Latching Relay Output Card
ADLINK PCI-7256 - 001 51-12206-0A2 REV.A2 LPCI-7256 16-CH Latching Relay Output Card -
 ADLINK ND6050 - NUDAM DIGITAL I/0 MODULE Distributed I/O Unit
ADLINK ND6050 - NUDAM DIGITAL I/0 MODULE Distributed I/O Unit -
 ASEM BM100 - Box PC Embedded Fanless Industrial Computer
ASEM BM100 - Box PC Embedded Fanless Industrial Computer -
-3650.png) ADLINK PCI-7250 - PCI Acquisition Card 8-CH Relay Output & Isolated DI Board
ADLINK PCI-7250 - PCI Acquisition Card 8-CH Relay Output & Isolated DI Board -
 ADLINK PCI-8164 - Servo motion control 4-Axis Controller Card
ADLINK PCI-8164 - Servo motion control 4-Axis Controller Card -
 Basler XR2002F Voltage Regulator 9139400101
Basler XR2002F Voltage Regulator 9139400101 -
Basler 2D80367G23 DXCB De-Excitation Module 1200V 5000A
-
Basler SR4A-2B15B3A Static Regulator 120V 50/60Hz
-
 Basler SSR 125-12NF Static Regulator 9 1859 00 106
Basler SSR 125-12NF Static Regulator 9 1859 00 106 -
 Basler BE1-BPR Breaker Protection Relay 9272000315
Basler BE1-BPR Breaker Protection Relay 9272000315 -
 Basler SSR 63-12 Static Regulator 9 1859 00 101
Basler SSR 63-12 Static Regulator 9 1859 00 101 -
 Basler AEM-2020 Analog Expansion Module
Basler AEM-2020 Analog Expansion Module -
 Basler BE 25231-001 Transformer BE25231001
Basler BE 25231-001 Transformer BE25231001 -
Basler MVC 108 Manual Voltage Control 9037000102
-
 Basler PSS-100-Y5 Power System Stabilizer 0.1-5.0Hz
Basler PSS-100-Y5 Power System Stabilizer 0.1-5.0Hz -
Basler Electric BE1A-25-M1G-A6T-N4V1F Sync-Check Relay
-
 Basler Electric SR8A2B10B1A Static Voltage Regulator
Basler Electric SR8A2B10B1A Static Voltage Regulator -
Basler Electric SR8A2B10B1A Static Voltage Regulator
-
Basler Electric SSR 125-12 Static Voltage Regulator 9185900102
-
 Basler Electric 90-73900-102 Power Supply (Westinghouse 2374A07G03)
Basler Electric 90-73900-102 Power Supply (Westinghouse 2374A07G03) -
 Basler Electric 9400200117 Control Power Unit 12/24VDC 20W
Basler Electric 9400200117 Control Power Unit 12/24VDC 20W -
Basler Electric BE1-87G Solid State Generator Differential Relay
-
 Basler Electric BE1-32R Style C3ED1TA0S1F Solid State Protective Relay
Basler Electric BE1-32R Style C3ED1TA0S1F Solid State Protective Relay





