
Omron C500-TU001 3G2A5-TU001 PLC Teaching Box
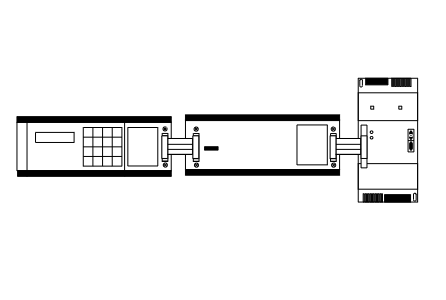
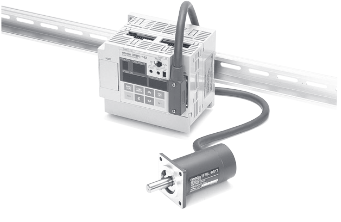
The Omron C500-TU001, also designated as model 3G2A5-TU001, is a position control teaching device designed specifically for the SYSMAC C500 series programmable logic controllers. This specialized unit enables operators to program single-axis positioning sequences through a manual teaching process, storing position coordinates for later playback during automated machine operation. The teaching box serves as an interface between operators and the motion control system, simplifying the process of defining positions, speeds, and sequences for axes controlled by the C500 PLC.
Position Control Architecture
The C500-TU001 implements incremental position control methodology, where position commands are expressed as relative movements from the current location rather than absolute coordinates referenced to a fixed origin. This approach is well suited to applications involving repetitive point to point movements where relative distances between positions remain consistent while the absolute reference may vary. The teaching box supports single-axis control, providing complete concentration of motion programming resources on one axis for straightforward positioning tasks including pick and place operations, transfer equipment positioning, indexing table rotation, and conveyor stop positioning.
Manual Teaching Operation
The teaching box accepts manual teaching inputs where the operator manually moves the axis to desired positions, recording the coordinates into the units memory for later playback. This teaching method is intuitive for operators familiar with the physical machine operation, allowing positions to be defined by direct manipulation rather than numerical coordinate entry. The teaching process typically involves jogging the axis to the first desired position, pressing a record button to store the coordinates, moving to the next position, and repeating until all required positions are programmed. The stored position data can be reviewed and edited as needed, with individual positions modifiable without re-teaching the entire sequence.
Feedback and Positioning Accuracy
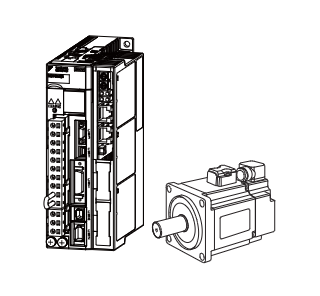
Position accuracy is maintained through closed-loop feedback from an encoder or similar position-sensing device, which reports actual axis location back to the control system for comparison against commanded position. The encoder provides continuous monitoring of axis movement, enabling the controller to detect and correct deviations from the intended path. This feedback mechanism compensates for mechanical variations including belt stretch, gear backlash, thermal expansion, and other factors that could otherwise degrade positioning precision. The control system calculates position error as the difference between target and actual locations, applying corrective signals to the drive amplifier to minimize this error and achieve the desired final position within the system accuracy specification.

Operating Modes
The C500-TU001 provides two primary operating modes that serve different phases of machine use. TEACHING mode is active during system setup and programming, allowing operators to manually position the axis and record coordinates into memory. PLAYBACK mode is used during normal production operation, causing the system to execute the programmed positioning sequence automatically, moving the axis through the recorded positions in sequence. Some systems incorporate additional operational options including single step execution for verification of programmed positions, continuous cycling for production runs, and position verification for quality checking. The teaching box includes status indicators that communicate current mode, axis position, error conditions, and other operational information to the operator.
System Integration and Memory
The C500-TU001 mounts into a designated slot in the SYSMAC C500 rack, connecting to the backplane for power and communication with the PLC CPU. The teaching box is compatible with C500 power input voltage ranges, integrating with the existing system power supply without requiring separate power connections. Battery-backed memory ensures programmed position data remains intact during power interruptions, with a backup battery maintaining memory contents when main power is removed. This non-volatile storage eliminates the need to re-teach positions after maintenance or facility power outages, preserving previously configured motion sequences for immediate operation upon power restoration.
- User name Member Level Quantity Specification Purchase Date
- Satisfaction :
-



-
 OMRON NS Series PT Remote Access
OMRON NS Series PT Remote Access -
 OMRON Z4M sensor precision measurement
OMRON Z4M sensor precision measurement -
 HIMMERWERK SINUS High Frequency Induction Heating Selection
HIMMERWERK SINUS High Frequency Induction Heating Selection -
 OMRON CP1E PLC Practical Selection Guide
OMRON CP1E PLC Practical Selection Guide -
 OMRON ZFX-C Vision Sensor in Practical Use
OMRON ZFX-C Vision Sensor in Practical Use -
 OMRON ZFV Intelligent Sensor Practical Guide
OMRON ZFV Intelligent Sensor Practical Guide -
 OMRON CJ Series PLC Practical Guide
OMRON CJ Series PLC Practical Guide -
 Murr SIRCO Isolation Switch Selection Guide
Murr SIRCO Isolation Switch Selection Guide -
 OMRON ZFX Vision Sensor Engineering Practice
OMRON ZFX Vision Sensor Engineering Practice -
 REER ULISSE UNC Security Light Curtain Practice
REER ULISSE UNC Security Light Curtain Practice -
 Siemens S5-90U/95U Fault Diagnosis and Advanced Programming
Siemens S5-90U/95U Fault Diagnosis and Advanced Programming -
 OMRON CPM2C system fault diagnosis and maintenance
OMRON CPM2C system fault diagnosis and maintenance -
 Yaskawa ∑ - V Servo Drive Debugging Guide
Yaskawa ∑ - V Servo Drive Debugging Guide -
 OMRON CP1H PLC Practical Manual
OMRON CP1H PLC Practical Manual -
 OMRON K-type PLC Maintenance Guide
OMRON K-type PLC Maintenance Guide -
 PEPPERL+FUCHS SLVA-4Kplus Safety Light Curtain Guide
PEPPERL+FUCHS SLVA-4Kplus Safety Light Curtain Guide -
 Yaskawa ∑ - II Servo Drive Debugging Guide
Yaskawa ∑ - II Servo Drive Debugging Guide -
 Yaskawa VS-616PC5/P5 frequency converter practical application
Yaskawa VS-616PC5/P5 frequency converter practical application -
 OMRON 3G3SV Inverter Practical Manual
OMRON 3G3SV Inverter Practical Manual -
 Pro face GP370 Complete Guide
Pro face GP370 Complete Guide -
 OMRON FQ2 Smart Camera Selection Guide
OMRON FQ2 Smart Camera Selection Guide -
 Practical Guide to Sony SH800 Sorter
Practical Guide to Sony SH800 Sorter -
 OMRON Cam Positioner Complete Guide
OMRON Cam Positioner Complete Guide -
 KEB F4 Inverter Debugging Guide
KEB F4 Inverter Debugging Guide -
 OMRON CJ series PLC operation and maintenance essentials
OMRON CJ series PLC operation and maintenance essentials -
 Essentials of Schneider C60H-DC DC DC Protector
Essentials of Schneider C60H-DC DC DC Protector -
 OMRON 3G3MV Inverter Practical Guide
OMRON 3G3MV Inverter Practical Guide -
 Essentials of OMRON CQM1H PLC System
Essentials of OMRON CQM1H PLC System -
 Essentials of ARD Elevator Emergency Rescue Device
Essentials of ARD Elevator Emergency Rescue Device -
 SolaHD SDN-D rail power supply
SolaHD SDN-D rail power supply -
 OMRON C200H PLC Troubleshooting and Programming Essentials
OMRON C200H PLC Troubleshooting and Programming Essentials -
 Allen Bradley 1336 PLUS Inverter Practical Guide
Allen Bradley 1336 PLUS Inverter Practical Guide -
 OMRON 3G3KV frequency converter
OMRON 3G3KV frequency converter -
 OMRON NSJ Integrated Controller
OMRON NSJ Integrated Controller -
 Megatiker M4 Circuit Breaker Maintenance
Megatiker M4 Circuit Breaker Maintenance -
 OMRON ZX laser sensor maintenance
OMRON ZX laser sensor maintenance -
 Saia PCD1 Controller Maintenance Guide
Saia PCD1 Controller Maintenance Guide -
 OMRON NT Series HMI Replacement and Maintenance
OMRON NT Series HMI Replacement and Maintenance -
 Yaskawa F7 Driver Maintenance and Replacement
Yaskawa F7 Driver Maintenance and Replacement -
 Rockwell 1494 switch selection replacement
Rockwell 1494 switch selection replacement -
 Omron NA Series HMI Connection Guide
Omron NA Series HMI Connection Guide -
 Eaton CV Series PLC System Upgrade and Diagnosis
Eaton CV Series PLC System Upgrade and Diagnosis -
 Eaton XV-102 HMI Installation and Troubleshooting
Eaton XV-102 HMI Installation and Troubleshooting -
 Siemens SINUMERIK measurement cycle configuration
Siemens SINUMERIK measurement cycle configuration -
 ELAU PacDrive C600 Controller Integration Guide
ELAU PacDrive C600 Controller Integration Guide -
 ELAU PacDrive SM Servo Motor Application and Maintenance Guide
ELAU PacDrive SM Servo Motor Application and Maintenance Guide -
 Bently Nevada Orbit 60 System Upgrade and Troubleshooting Guide
Bently Nevada Orbit 60 System Upgrade and Troubleshooting Guide -
 YOKOGAWA STARDOM FCN-RTU Controller
YOKOGAWA STARDOM FCN-RTU Controller -
 Fireye InSight II Marine Flame Scanner
Fireye InSight II Marine Flame Scanner -
 How to install ABB VSC vacuum contactor?
How to install ABB VSC vacuum contactor? -
 Rexroth Bosch Group VT2000 Proportional Amplifier
Rexroth Bosch Group VT2000 Proportional Amplifier -
 ALSTOM ALSPA series frequency converter
ALSTOM ALSPA series frequency converter -
 ABB SPACOM replaces REX615
ABB SPACOM replaces REX615 -
 Meggitt C327895 Gas Metering Valve Technology
Meggitt C327895 Gas Metering Valve Technology -
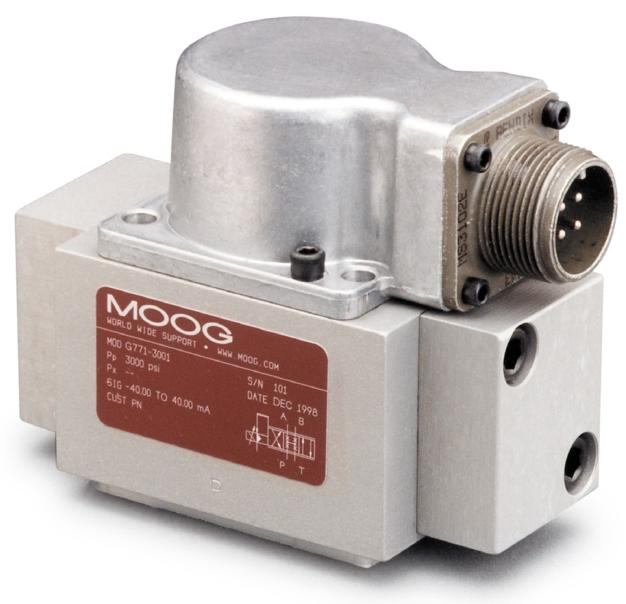 Application of MOOG G77x servo valve
Application of MOOG G77x servo valve -
 WOODWARD 2301E Digital Speed Controller
WOODWARD 2301E Digital Speed Controller -
 ABB UNITOL 1010/1020 AVR Compact IGBT Automatic Voltage Regulator
ABB UNITOL 1010/1020 AVR Compact IGBT Automatic Voltage Regulator -
 ABB UNITOL 6000 excitation system
ABB UNITOL 6000 excitation system -
 Rexroth Bosch Group HNC100 Hydraulic Shaft Control
Rexroth Bosch Group HNC100 Hydraulic Shaft Control -
 Lenze 8400 Inverter Debugging Guide
Lenze 8400 Inverter Debugging Guide -
 Panning Vacuum Sensor Maintenance Guide
Panning Vacuum Sensor Maintenance Guide -
 SOGEVAC Rotary Disc Pump Maintenance Guide
SOGEVAC Rotary Disc Pump Maintenance Guide -
 THERMOVAC MEMS Vacuum Gauge Guide
THERMOVAC MEMS Vacuum Gauge Guide -
 TTR 101 Vacuum Gauge Troubleshooting Guide
TTR 101 Vacuum Gauge Troubleshooting Guide -
 Honeywell Beam Smoke Detector Guide
Honeywell Beam Smoke Detector Guide -
 TURBOVAC Molecular Pump Maintenance Guide
TURBOVAC Molecular Pump Maintenance Guide -
 Troubleshooting of Leuze electronic DDLS 200 optical transmission
Troubleshooting of Leuze electronic DDLS 200 optical transmission -
 Lam Harmonic Drive Quick Replacement Guide
Lam Harmonic Drive Quick Replacement Guide -
 LZS power replacement and troubleshooting
LZS power replacement and troubleshooting -
 MTL2000 series isolation barrier
MTL2000 series isolation barrier -
 Temposonics GB Sensor
Temposonics GB Sensor -
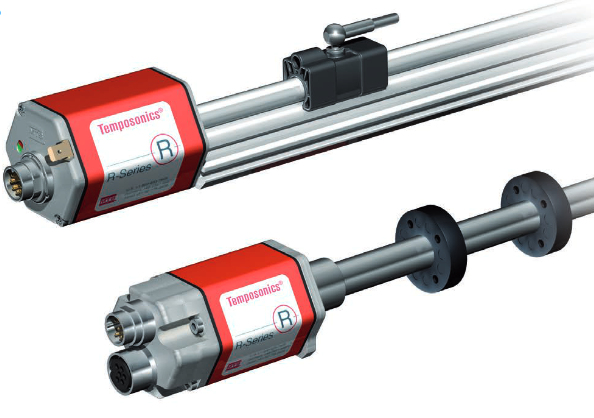 Temposonics R Series Magnetostrictive Displacement Sensor Depth
Temposonics R Series Magnetostrictive Displacement Sensor Depth -
 Original inventor of M ü ller Co ax AG coaxial valve
Original inventor of M ü ller Co ax AG coaxial valve -
 Murrelektronik Automation Solution Complete Solution
Murrelektronik Automation Solution Complete Solution -
 Nabtesco RV series high-precision gearbox
Nabtesco RV series high-precision gearbox -
 NACHI Robot Full Series
NACHI Robot Full Series -
 Electro hydraulic proportional directional flow valve
Electro hydraulic proportional directional flow valve -
 NEC FC-9801X Industrial Computer
NEC FC-9801X Industrial Computer -
 Mark VIeS Security System
Mark VIeS Security System -
 NI RIO Platform: Embedded Measurement and Control Solution Integrating Real time Processing and FPGA
NI RIO Platform: Embedded Measurement and Control Solution Integrating Real time Processing and FPGA -
 NI sbRIO-9612 Single Board Controller
NI sbRIO-9612 Single Board Controller -
 NI EPM high-performance DAQ cable
NI EPM high-performance DAQ cable -
 NI SCXI-1349 Adapter Connection Guide
NI SCXI-1349 Adapter Connection Guide -
 NI SCXI Chassis Configuration and Installation Guide
NI SCXI Chassis Configuration and Installation Guide -
 SNAP PAC System Architecture and Selection Guide
SNAP PAC System Architecture and Selection Guide -
 PacSci Model 6410 Microstep Driver
PacSci Model 6410 Microstep Driver -
 TI 11kW GaN three-phase ANPC inverter
TI 11kW GaN three-phase ANPC inverter -
 Pepperl+Fuchs K-System Isolation Barrier Complete Guide
Pepperl+Fuchs K-System Isolation Barrier Complete Guide -
 Pacific Scientific POWERMAX II stepper motor
Pacific Scientific POWERMAX II stepper motor -
 LINAK LA23 Compact Industrial Electric Push Rod
LINAK LA23 Compact Industrial Electric Push Rod -
 Pacific Scientific Servo Drive Selection Guide
Pacific Scientific Servo Drive Selection Guide -
 Pacific Scientific SCE900 Servo Drive Complete Guide
Pacific Scientific SCE900 Servo Drive Complete Guide -
 Pro face PFXSTM6400WAD human-machine interface
Pro face PFXSTM6400WAD human-machine interface -
 Pacific Scientific 6410 Stepper Driver
Pacific Scientific 6410 Stepper Driver -
 Parker EVM32-II Modular Expansion Base Plate
Parker EVM32-II Modular Expansion Base Plate -
 Parker COMPAX series compact servo controller: integrated motion control and drive
Parker COMPAX series compact servo controller: integrated motion control and drive -
 Parker Compumotor ZETA6000 Single Axis Drive Controller
Parker Compumotor ZETA6000 Single Axis Drive Controller -
 PI C-663.12 Mercury Step Motor Controller
PI C-663.12 Mercury Step Motor Controller -
 NetTest TUNICS series tunable external cavity laser
NetTest TUNICS series tunable external cavity laser -
 Complete Guide to Inline Automation Terminal System
Complete Guide to Inline Automation Terminal System -
 Phoenix FL MC 1000 SC (ST) Fiber Optic Converter
Phoenix FL MC 1000 SC (ST) Fiber Optic Converter -
 Phoenix ST series spring cage terminal block
Phoenix ST series spring cage terminal block -
 ROSS Pneumatic Valve Full Series
ROSS Pneumatic Valve Full Series -
 BD SENSORS DMP 333 High Pressure Transmitter
BD SENSORS DMP 333 High Pressure Transmitter -
 OE Max Controls NX70 series PLC
OE Max Controls NX70 series PLC -
 SAIA PCD4.W500/W600 Intelligent Simulation Module
SAIA PCD4.W500/W600 Intelligent Simulation Module -
 Saia Burgess PCD4.U100 Migration Kit
Saia Burgess PCD4.U100 Migration Kit -
 SAIA PCD1 Controller Full Series
SAIA PCD1 Controller Full Series -
 SAIA Burgess PCD2.H110 Counting and Measurement Module
SAIA Burgess PCD2.H110 Counting and Measurement Module -
 SAMSON Type 3434 Pneumatic Controller Module
SAMSON Type 3434 Pneumatic Controller Module -
 SanDisk iNAND Flash and microSD
SanDisk iNAND Flash and microSD -
 Optimus® Product Family of SAS SSDs
Optimus® Product Family of SAS SSDs -
 SANMOTION PB servo stepper
SANMOTION PB servo stepper -
 ADCA AVM/AVF234S electric actuator
ADCA AVM/AVF234S electric actuator -
 SBS Technologies VIPC616 Carrier Board
SBS Technologies VIPC616 Carrier Board -
 SBS Technologies VIPC616 VME Carrier Board
SBS Technologies VIPC616 VME Carrier Board -
 Greenspring P2 Video Graphics Controller
Greenspring P2 Video Graphics Controller -
 ABB UniPack-S Steel Compact Substation
ABB UniPack-S Steel Compact Substation -
 Schaffner Ecosine ® Economy Line FS 42842 Compact Passive Harmonic Filter
Schaffner Ecosine ® Economy Line FS 42842 Compact Passive Harmonic Filter -
 Schenck Process INTECONT Tersus Weighing Instrument
Schenck Process INTECONT Tersus Weighing Instrument -
 ENTRELEC contactor relay
ENTRELEC contactor relay -
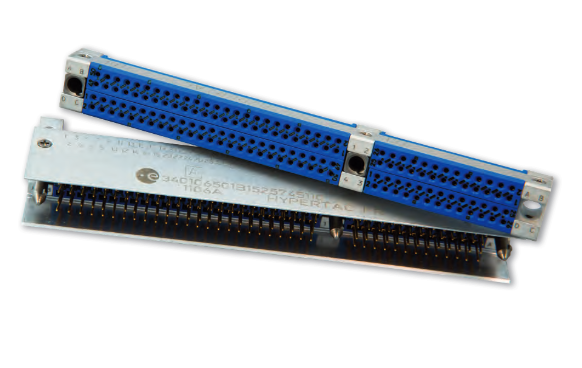 Smiths Connectors MHD/MDD/MDP CONNECTOR SERIES PCB High Density Connectors
Smiths Connectors MHD/MDD/MDP CONNECTOR SERIES PCB High Density Connectors -
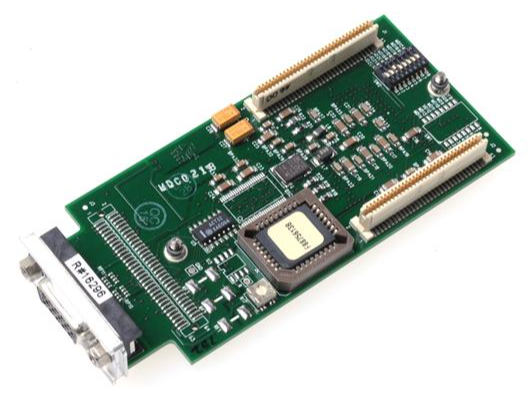
 SEW EURODRIVE DFP21B bus interface
SEW EURODRIVE DFP21B bus interface -
 SEW-EURODRIVE MOVIDRIVE B Series Manual
SEW-EURODRIVE MOVIDRIVE B Series Manual -
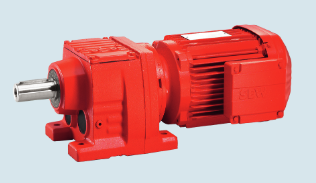 SEW Eurodrive R series parallel axis reduction motor
SEW Eurodrive R series parallel axis reduction motor -
 SEW EURODRIVE DFY/DFS Synchronous Motor Guide
SEW EURODRIVE DFY/DFS Synchronous Motor Guide -
 SEW MOVITRAC 31C Installation and Debugging
SEW MOVITRAC 31C Installation and Debugging -
 SEW EURODRIVE MOVIDYN communication interface
SEW EURODRIVE MOVIDYN communication interface





